


Home >
Sensor Fusion >
Screwing nut with high-speed robot hand using high-speed visual feedback
Screwing nut with high-speed robot hand using high-speed visual feedback
Summary
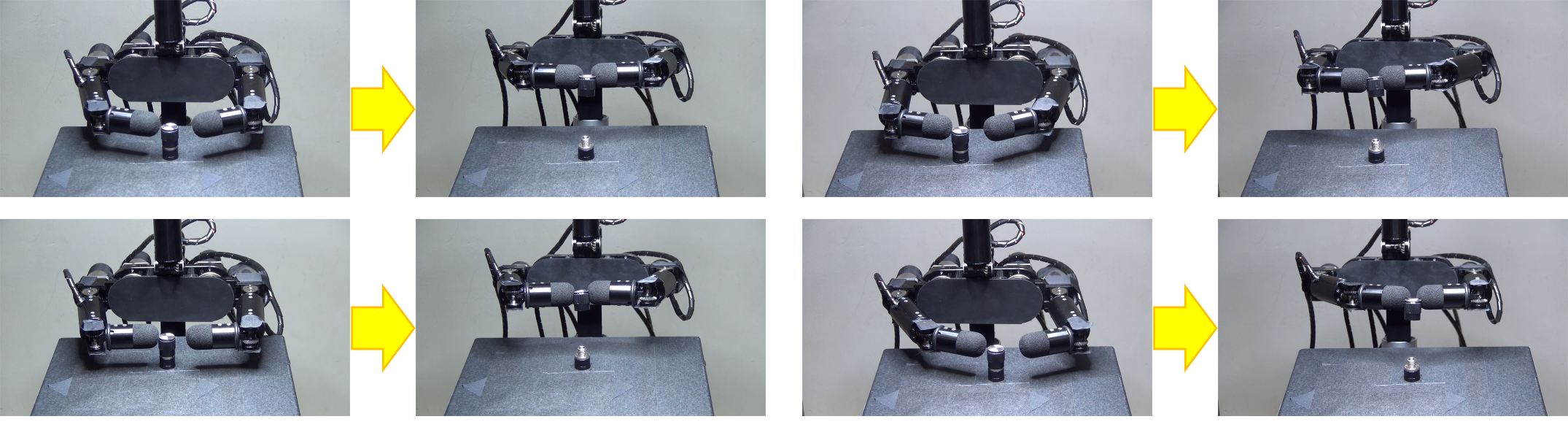
This research focuses on the manipulation in assembling of industrial products with general purpose robot hand, and nut screwing task is chosen as an example of such task. Marker is attached on the head of nut to manipulate, and vision sensor get the rotation of the nut. In addition the detection of location of nut, correction by active search is introduced. From rotation information from vision sensor, robot hand catches the nut immediately after it is off from its base.
Movie
Reference
- Yusuke Tsukamoto, Yuji Yamakawa, Taku Senoo, and Masatoshi Ishikawa: Strategy for screwing nut with high-speed robot hand using high-speed visual feedback, 2016 JSME Conference on Robotics and Mechatronics (ROBOMECH2016) (Yokohama, 2016.6.10) / Proceedings, 2P1-04a3.