


Network System for High-Speed Vision
Summary
We have shown that high-framerate visual feedback is essentially important for various applications including high-speed robot control systems and human-computer interfaces.
On the other hand, the importance of sensor network is increasing. It enables obtaining information that cannot be obtained by a single sensor nor by locally distributed sensors.
This work aims to enhance the application of the high-speed vision (HSV) technologies by introducing a networked architecture into HSV systems.
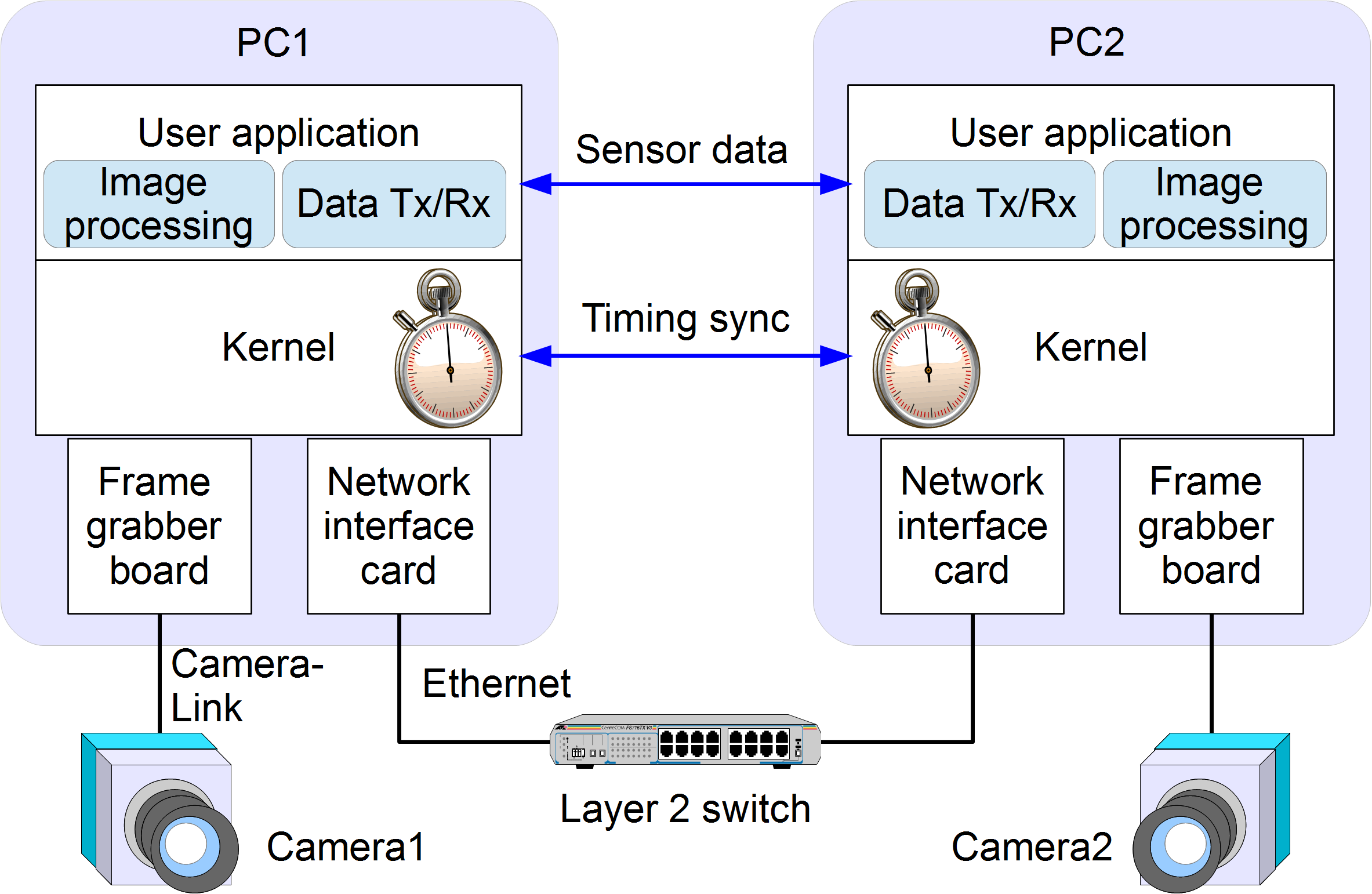
In a usual IP network, the packet latency is not guaranteed to be significantly less than the 1-ms frame interval of a 1,000-fps HSV. Since there can be significant latencies and changes in packet order, when the data was acquired have to be known and shared over the network. Therefore, in each vision sensor, timestamps have to be provided for every acquired frames.
Besides, the timescale synchronization over the network is required to correctly align the data in time.
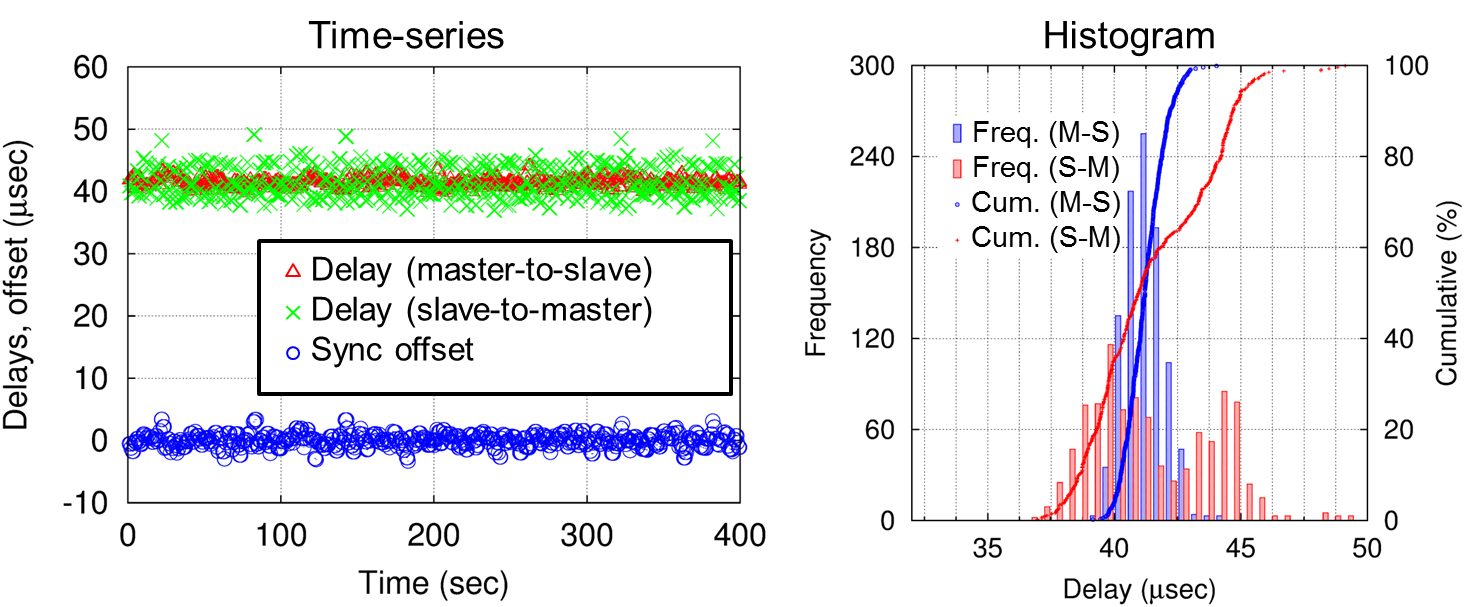
For this purpose, Precision Time Protocol (PTP), which has been standardized as IEEE 1588, was employed for constructing a timescale-synchronized network for HSV, with synchronization errors less than 10 microseconds.
Reference
- Akihito Noda, Yuji Yamakawa, Masatoshi Ishikawa: High-Speed Object Tracking Across Multiple Networked Cameras, Proc. 2013 IEEE/SICE International Symposium on System Integration (SII 2013), pp. 913-918 (2013)