


ネットワーク型高速ビジョンシステムのフレーム同期
概要
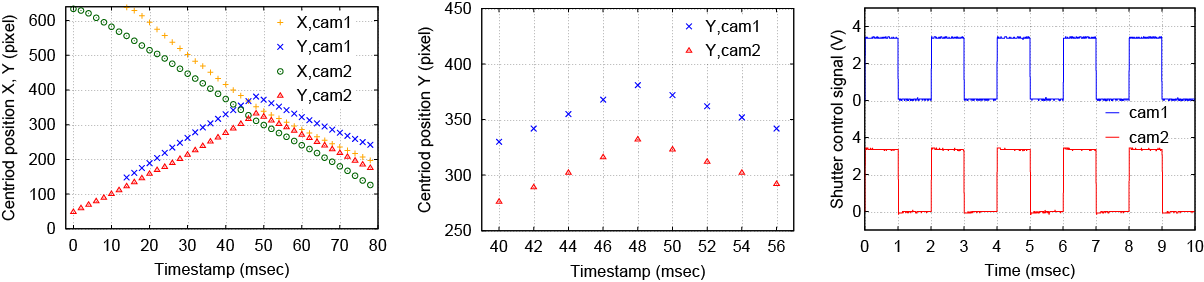
本研究では,ネットワーク型高速ビジョンシステムを構成している高速ビジョン群のフレーム同期を実現するための方法を提案している. ネットワーク型高速ビジョンシステムでは各ビジョンの時間同期が実現されているため, フレーム時刻とシャッターのトリガー信号を用いて,次のシャッタータイミングを推定することができる. このシャッタータイミングを用いることにより,各ビジョン間のフレーム同期を可能にしている. 加速度が瞬間的に変化する物体のトラッキングを行った結果,同時刻で対象物体の速度が変化していることを捉えることができ, かつシャッターのトリガー信号が同タイミングで取得できている.

参考文献
- 野田聡人,山川雄司,石川正俊:ネットワーク型高速ビジョンシステムのフレーム同期,ロボティクス・メカトロニクス講演会2014,3P2-M02 (2014)
- Akihito Noda, Yuji Yamakawa and Masatoshi Ishikawa: Frame Synchronization for Networked High-Speed Vision Systems, IEEE SENSORS 2014, pp.269-272 (2014)