


Frame Synchronization for Networked High-Speed Vision Systems
Summary
We propose a frame synchronization scheme for 500-fps class high-speed networked vision systems. Multiple vision sensor nodes, individually comprising a camera and a PC, are connected via Ethernet for data communication and for clock synchronization. The clocks of the PCs are synchronized over the network by Precision Time Protocol (PTP) with negligible errors around a few microseconds.
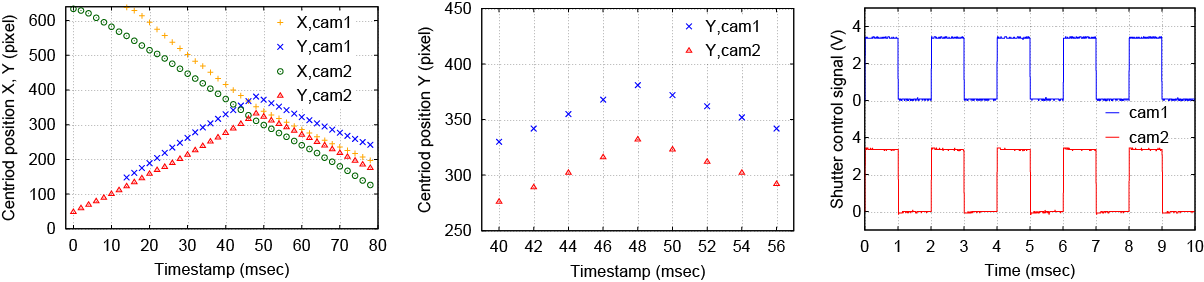
In the proposed scheme, the trigger of each camera's shutter is locally controlled based on the PCs clock that is locally provided inside the node and is globally synchronized over the network. An experimental system comprising two cameras and two PCs is presented, and the experiment results show that the shutter timing error between the two cameras are less than 10 microseconds, which is significantly smaller than the frame interval of 2 milliseconds.

Reference
- Akihito Noda, Yuji Yamakawa and Masatoshi Ishikawa: Frame Synchronization for Networked High-Speed Vision Systems, IEEE SENSORS 2014, pp.269-272 (2014)