


Home >
Sensor Fusion >
One Handed Knotting of flexible rope using a High-speed Multifingered Hand
One Handed Knotting of flexible rope using a High-speed Multifingered Hand
Summary
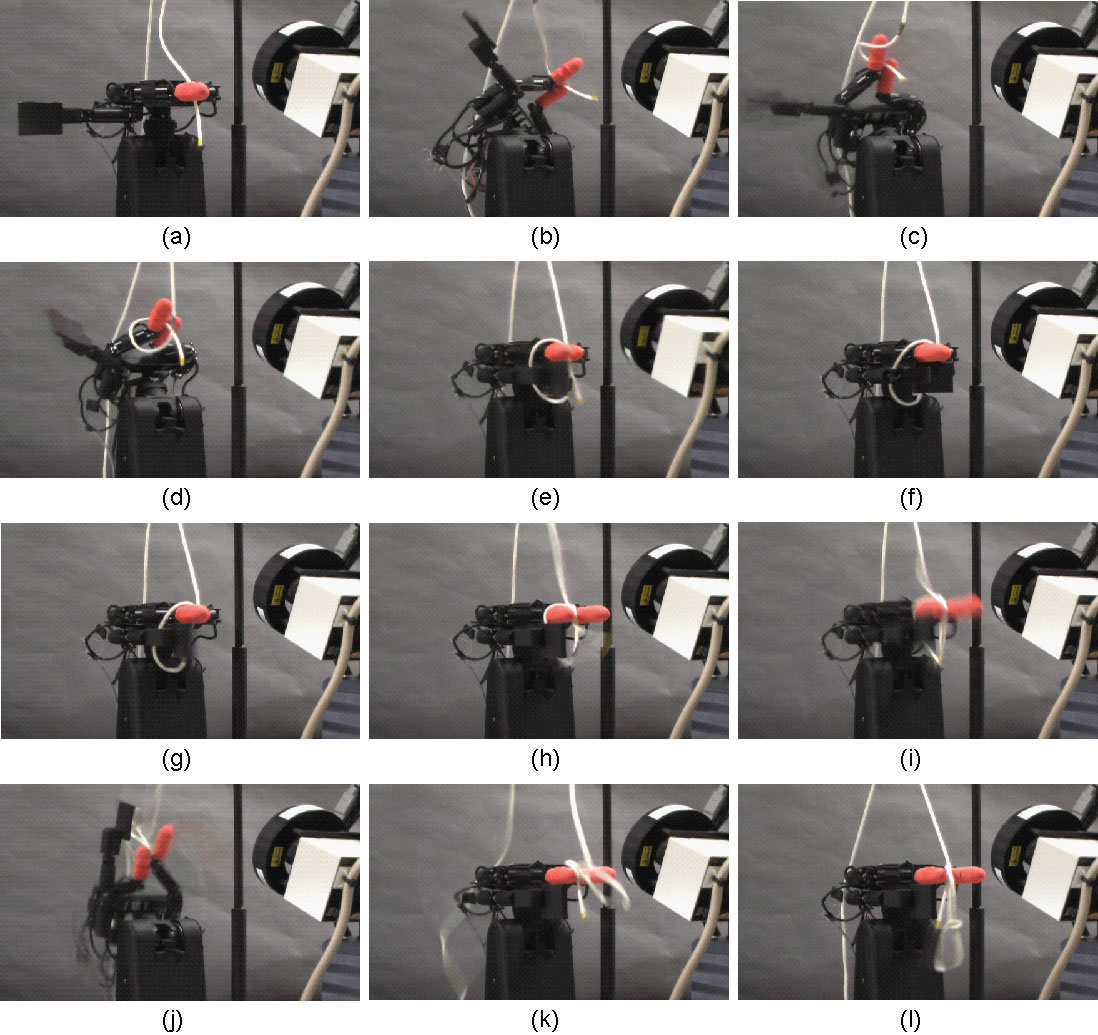
This research proposes a new strategy of one handed knotting with a high-speed multifingered robot hand and tactile and visual sensors. The strategy is divided to three steps: loop production, rope permutation, and rope pulling. Through these three steps, a knotting is achieved by only one multifingered robot hand. Moreover, this study proposes the control method of wrist joint angle in loop production and the grasping force control in rope permutation.
Movies
- one handed knotting 1 (slow motion)
- loop production (visual feedback)
- rope permutation (tactile feedback)
References
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: One-handed Knotting of a flexible rope using a high-speed multifingered hand, Proceedings of the 7th SICE System Integration Division Annual Conference (SI2006), pp. 744/745 (2006)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: High-speed One handed Knotting of Flexible Rope using Tactile Feedback, Proceedings of the 2007 JSME Conference on Robotics and Mechatronics, 2A1-E08 (2007)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: One-handed Knotting of a Flexible Rope with a High-speed Multifingered Hand having Tactile Sensors, Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 703/708 (2007)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: Flexible Rope Manipulation by a Multifingered Hand Using High-speed Visual and Tactile Feedback, Proceedings of the 8th SICE System Integration Division Annual Conference (SI2007), pp. 59/60 (2007)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: High-speed Manipulation of a Flexible Rope Using a Multifingered Hand and Visual and Tactile Feedback, Proceedings of the 13th Robotics Symposia, pp. 529/534 (2008)
- Yuji Yamakawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo: Knotting Manipulation of a Flexible Rope Using a High-speed Multifingered Hand and High-speed Visual and Tactile Sensory Feedback, Journal of the Robotics Society of Japan, Vol. 27, No. 9, pp. 1016/1024 (2009)