


Home > Facilities
Research Projects and Facilities
Research Projects (2026 fisical year)
The following list includes projects in which laboratory members including students become leaders or members.
- Multidimensional Digital Twin Sensing and Reconstruction Based on High-speed Vision (2021-2028, SVD, SF, DVS, AP)
- Detection of Flow Channel Anomalies Using Dynamic Markers from Persistent Luminescence (2025-2028, AP)
- High-speed 3D Image Measurement System Toward Next Generation Endoscopy (2023-2026, DVS)
- High-speed, high-precision, high-efficiency image scanning using refraction of light in a rotating transparent prism (2024-2026, AP)
- High-speed comprehension of the object information based on the combination of high-speed 3D vision and recognition using machine learning (2026-2029, SVD)
- High-Speed Image Processing and Its Application (2022-2026, AP, SF, DVS, SVD)
- SF:Sensor Fusion, DVS:Dynamic Vision System, SVD:System Vison Design, AP:Active Perception
Experimental Environment
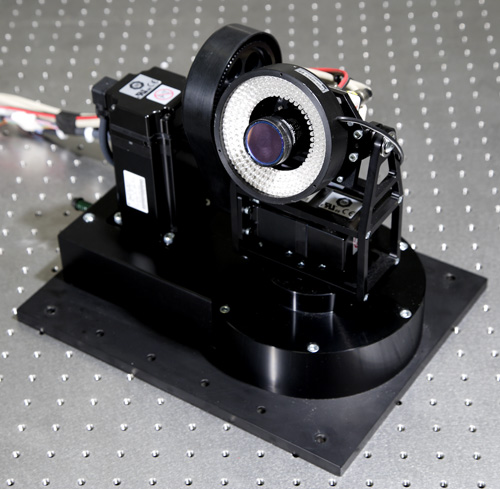
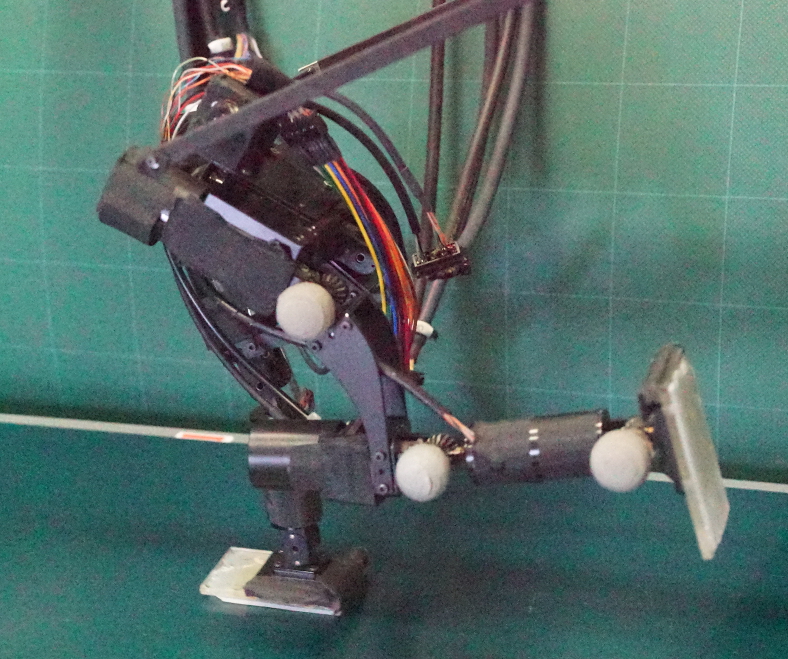
Sensor Fusion Experimental Environment



|
|
(codeveloped with Harmonic Drive Systems,Inc.) (codeveloped with Harmonic Drive Systems, Inc.) |
(codeveloped with Hamamatsu Photonics K.K.) (codeveloped with Harmonic Drive Systems,Inc.) |
|||
Dynamic Vision System Experimental Environment



|
|
|
|
|||
System Vision Design Experimental Environment



|
|
|
(Digital Oscilloscope, Data Generator, Logic Analyzer, 3D Laser Scanner) |
|||
Active Perception Experimental Environment


|
|
|
(Digital Oscilloscope, Lock-in Amplifier, Waveform Generator, Lightwave Multimeter) |
|||