


微細部品の組み立て実現を目指した高速高精度ロボットハンドの開発
概要
近年生産の現場においては産業用ロボットの導入によるFAが急速に進んでおり、生産工程の高精度化、高速化が実現されてきました。 しかし微細な部品の組み立ては自動化が困難と言われており、現在でも人手に頼った生産がなされています。例えば腕時計内部の部品の組み立ては現在でも全自動化はなされておらず熟練工による手作業での組み立てが行われています。
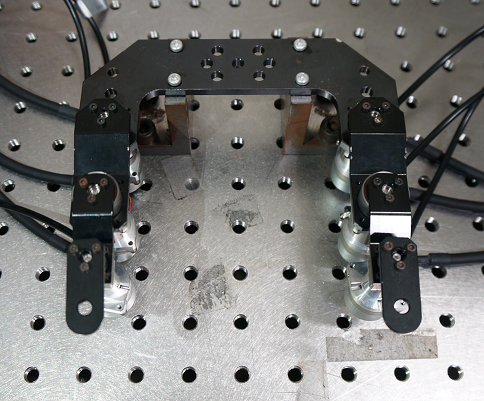
-石川グループ研究室ではこうした微細部品の組み立ての全自動化をロボットハンドによって実現しようと考えています。幅広い形状と大きさの対象を扱う必要のある工業的な組み立て動作は、高い操作の柔軟性と高い精度の両方を要求します。 この実現には従来の低自由度なマイクロマニピュレーターでは不十分であり、これまでは一般に大きな物体を対象としていた多自由度のロボットハンドの高精度化が解決策になると考えられます。 この第一歩として、本研究ではプロトタイプの高速高精度ハンドを開発し、ビジョンシステムとの組み合わせによって0.1mmの物体を把持し、移動させ、整列させるタスクを全自動で行うことを直近の目標としています。
参考文献
- Hiroshi Sato, Yuji Yamakawa, Taku Senoo, and Masatoshi Ishikawa: Development of a High-speed, High-accuracy Robot Hand for Micromanipulation, 2016 IEEE International Conference on Robotics and Biomimetics (Qingdao, China, 2016.12.3-7)/Proceedings, pp.1535-1541.
- 佐藤宏, 山川雄司, 妹尾拓,石川正俊: 高速高精度ロボットハンドの開発, 第34回日本ロボット学会学術講演会 (RSJ2016) (山形, 2016.9.7)/講演論文集, 1B1-02