


指上での転がりを利用した高速ハンドアームによる投球方向制御
概要
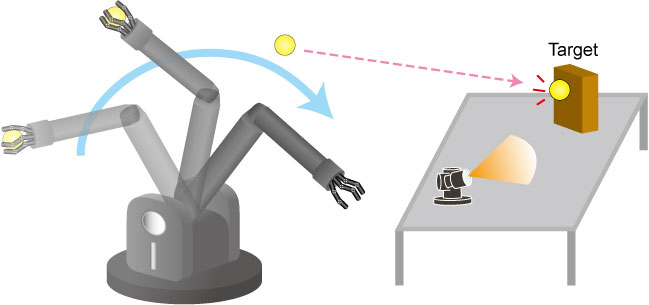
本研究では,人の投球を参考に指の動作を用いることで,ロボットハンドアームによる投球方向の制御を行う.
投球動作の,ボールを押さえている指を離すタイミングと指上でのボールの転がりに着目してモデル化を行い,シミュレーションにより指を離すタイミングによる投球方向への影響を調べた.そして,任意に配置した対象に対し,高速ビジョンで対象の位置を認識し,その位置から求めた適切なタイミングで指を離すことで,高速ハンドアームで対象に向かって投球を行った.
関連研究
動画
参考文献
- Taku Senoo, Yuuki Horiuchi, Yoshinobu Nakanishi, Kenichi Murakami and Masatoshi Ishikawa: Robotic Pitching by Rolling Ball on Fingers for a Randomly Located Target, 2016 IEEE International Conference on Robotics and Biomimetics (Qingdao, China, 2016.12.4) / Proceedings, pp. 325-330, 2016. T. J. Tarn Best Paper in Robotics Award
- 村上健一, 堀内悠生, 中西慶亘, 妹尾拓, 石川正俊: 指上での転がりを利用した高速ハンドアームによる投球方向制御, 第17回 計測自動制御学会システムインテグレーション部門講演会 (札幌, 2016.12.17) / 講演会論文集, pp. 3086-3088.
- 村上健一,堀内悠生,中西慶亘,妹尾拓,石川正俊:ボールリリース解析に基づくロボット投球制御, 第22回ロボティクスシンポジア (安中,2017.3.16) / 講演論文集, pp. 221-226, 2017.