


Home >
Sensor Fusion >
Robotic Pitching by Rolling Ball on Fingers for a Randomly Located Target
Robotic Pitching by Rolling Ball on Fingers for a Randomly Located Target
Summary
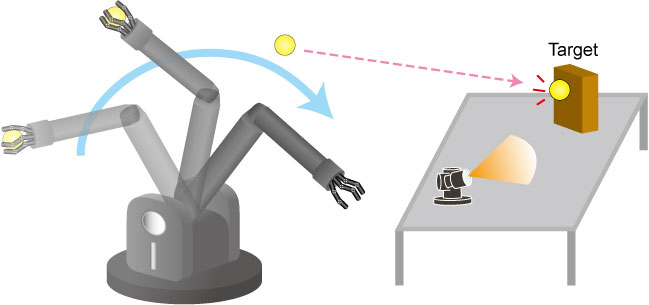
In this study, a robotic pitching task is considered with the goal of achieving dynamic manipulation. To control the pitching direction of the ball, the strategy using the rolling of the ball on fingers is derived with reference to human pitching. The effect of shift in the release timing on the pitching direction is analyzed based on the ball dynamics. Experimental results are shown in which a high-speed manipulator composed of a 4 DOFs robot arm with a 10 DOFs robot hand throws a ball towards a randomly-located target recognized with high-speed vision. As for robotic high-speed pitching based on the ``kinetic chain'' which is observed in human throwing, you can also see here.
Movie
Reference
- Taku Senoo, Yuuki Horiuchi, Yoshinobu Nakanishi, Kenichi Murakami and Masatoshi Ishikawa: Robotic Pitching by Rolling Ball on Fingers for a Randomly Located Target, 2016 IEEE International Conference on Robotics and Biomimetics (Qingdao, China, 2016.12.4) / Proceedings, pp. 325-330, 2016. T. J. Tarn Best Paper in Robotics Award