


ホーム >
センサ フュージョン > 高速ビジョンを用いた形状取得によるフレキシブルアーム操作
高速ビジョンを用いた形状取得によるフレキシブルアーム操作
概要
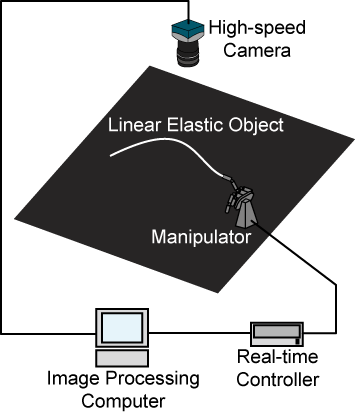
本研究では高速ビジョンシステムを利用したフレキシブルアームの制御を行う.
低剛性アームのフィードバック制御に用いるセンサとして,ビジョンセンサが注目されているものの,低い画像処理速度とフレームレートの不足が問題となってきた.
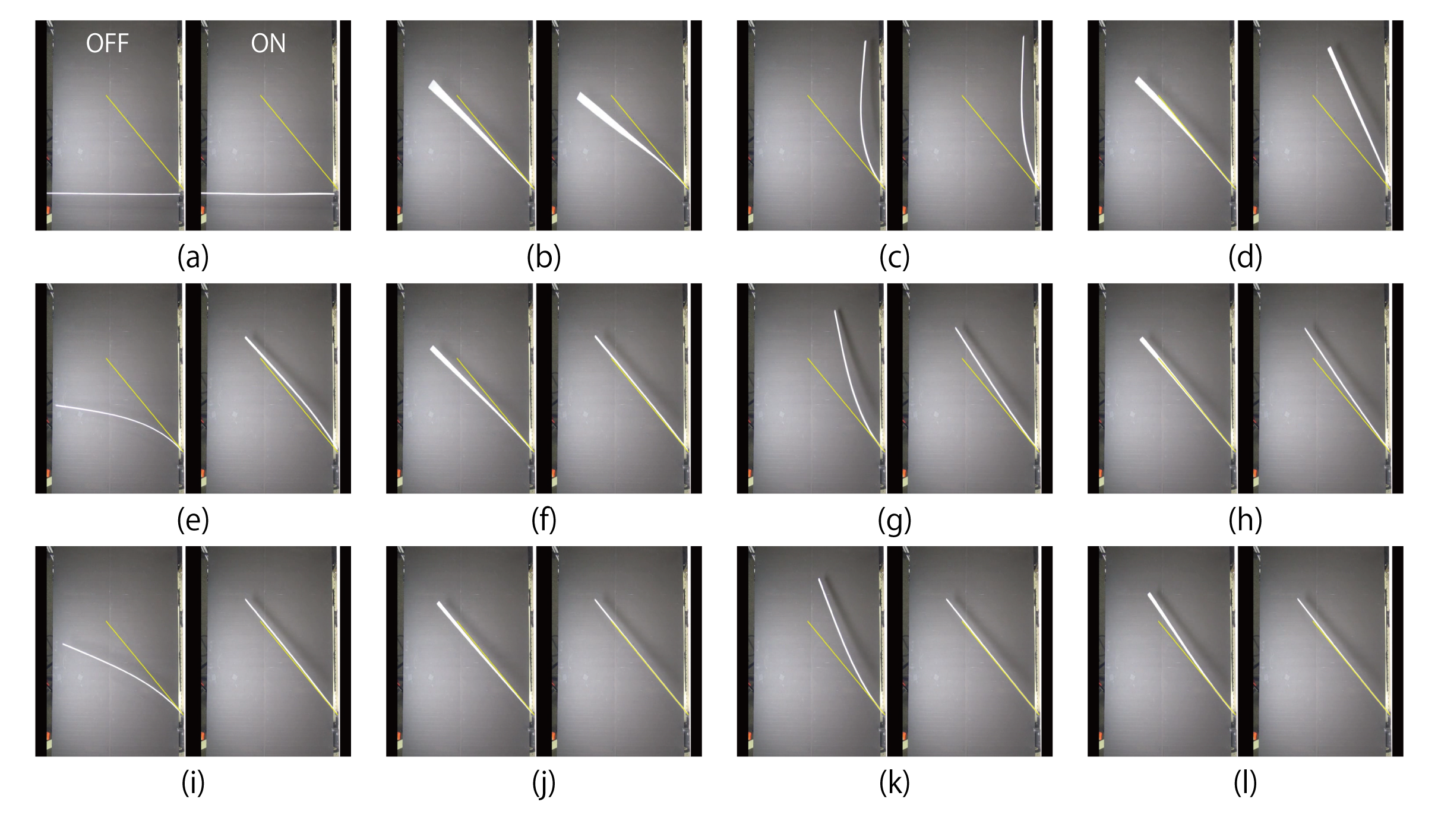
本研究では,高速ビジョンシステムの導入によってこのような問題を軽減させた上で,操作対象となるアームの変形の情報を取得・利用することによるフレキシブルアームのマニピュレーションを目標とした.実験では,ビジョンシステムから得られるアームの形状から振動情報の取得を行い,操作後にアームに生じる振動の抑制が実現できることを確認した.
動画
参考文献
- 塚本勇介, 山川雄司, 妹尾拓, 石川正俊: 高速ビジュアルフィードバックを用いた線状弾性体の操り, 第22回ロボティクスシンポジア (群馬, 2017.3.15) / 講演会論文集, pp. 63-64, 2017.