


ホーム >
センサ フュージョン > 感覚運動統合システムにおけるダイナミクス整合の獲得
感覚運動統合システムにおけるダイナミクス整合の獲得
概要
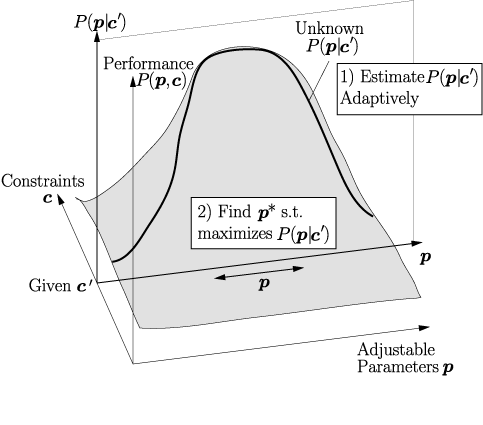
感覚運動統合システムの高速化が進むにつれ, システムの各要素の持つ物理的・計算的な時間的特性 (ダイナミクス) が制約となって, パフォーマンスに及ぼす影響が無視できなくなってくる. そこで我々は「物理的・計算的な制約のもとで,システムの感覚系, 処理系,運動系各々の時間的特性を調整し, タスクや外界のダイナミクスに整合させることで, 状況に応じたパフォーマンスの最大化を目指す」という概念を提唱し, 「ダイナミクス整合」と名付けた.
本研究ではダイナミクス整合問題をモデル化し, その適応的獲得アルゴリズムを強化学習を用いて構築した.

また,アクティブビジョンによる目標追跡課題を例題とした数値実験によりアルゴリズムを検証し, 制約に応じてダイナミクスが適切に調整されること, 振舞いのレベルでも合理的な解が獲得されることを示した.
参考文献
- Naoko Ogawa, Yutaka Sakaguchi, Akio Namiki and Masatoshi Ishikawa : Adaptive Acquisition of Dynamics Matching in Sensory-Motor Fusion System, Electronics and Communications in Japan (Part III: Fundamental Electronic Science), Vol.89, No.7, pp.19-30 (2006.7) [PDF (1.0M)] [doi:10.1002/ecjc.20255] *Wiley)
- 尾川 順子,阪口豊,並木明夫,石川正俊:感覚運動統合システムにおけるダイナミックス整合の適応的獲得, 電子情報通信学会論文誌D-II, Vol.J87-D-II,No7,pp.1505-1515 (2004.7) [PDF (910K)]
- Naoko Ogawa, Yutaka Sakaguchi, Akio Namiki and Masatoshi Ishikawa : Adaptive Dynamics Matching in Sensory-Motor Fusion System and Its Implementation by Reinforcement Learning, 2002 IEEE International Conference on Robotics and Automation (ICRA 2002) (Washington D.C., 2002.5.11)/In Learning Skill for Enhancing the Capability of Artificial System (Y. Sakaguchi ed.), Workshop Note (2002.5) [PDF (120K)]
- 尾川順子,阪口豊,並木明夫,石川正俊:多様な制約に対するダイナミクス整合の学習, 第19回日本ロボット学会学術講演会 (東京,2001.9.19)/講演論文集, 2H23,pp711-712
- 阪口豊,並木明夫,尾川順子,石川正俊:感覚運動統合におけるダイナミクス整合と強化学習によるその獲得, CREST研究領域「脳を創る」第2回公開シンポジウム (東京,2001.6.5)/予稿集「脳を創る」, p.30 (2001.6) [Abstract]
- 尾川順子,阪口豊,並木明夫,石川正俊:ダイナミクス整合に基づく感覚運動統合--- ターゲットトラッキングにおける戦略の学習---, 電子情報通信学会ニューロコンピューティング研究会 (東京,2001.3.14)/電子情報通信学会技術研究報告,NC2000-109, Vol.100, No.686, pp.47-54 (2001.3) [PDF (205K)]