


Dynamic Grasping Using High-speed Visual Feedback
Summary
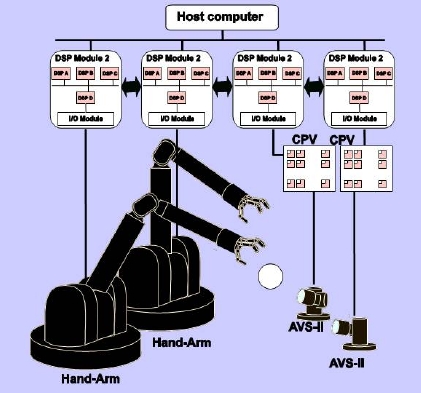
In most conventional manipulation systems, changes in the environment cannot be observed in real time because the vision sensor is too slow. As a result the system is powerless under dynamics changes or sudden accidents. To solve this problem we have developed a high-speed manipulation system using high-speed visual feedback. This is a hand-arm with a hierarchical parallel processing system and visual feedback rate is set as 1ms. Using this system, we have achieved many manipulation such as grasping, collision avoidance, and so on.
Movies
References
- Akio Namiki and Masatoshi Ishikawa : Robotic Catching Using a Direct Mapping from Visual Information to Motor Command, Proc. IEEE Int. Conf. on Robotics and Automation (Taipei, 2003.9.17)/Proceedings, 2003,pp.2400-2405 (2003) [ PDF format ]
- Akio Namiki and Masatoshi Ishikawa : Vision-Based Online Trajectory Generation and Its Application to Catching, Control Problems in Robotics (A.Bicchi, H.I.Christensen, and D. Prattichizzo Eds.), pp.249-264, Springer (2002) [ PDF format ]