


2台の高速多指ハンドとスライダを用いた布の動的な折りたたみ操作
概要
これまでに剛体のマニピュレーションを対象として,様々な解析・制御手法提案が行われ, 現在も盛んに研究されている.一方,柔軟物体のマニピュレーションはその実現が望まれているものの, タスクを実現するための戦略提案,柔軟物体のモデル構築と制御などの多くの問題点が存在し, その実現が困難とされてきた.近年になり,柔軟物体のモデルが構築され, 視覚フィードバックによる軌道生成手法も提案され, 線状柔軟物体のマニピュレーションとして紐結びが実現され, 面状柔軟物体のマニピュレーションとして布の展開動作や折り紙操作が実現されている. さらに,面状柔軟物体に似た帯状柔軟物体のモデル構築も行われている.
しかしながら,従来の柔軟物体マニピュレーションは,ロボットを低速で動作させて静的な操りを行ってきた. 本研究室では柔軟物体の動的マニピュレーションを目指して, ダイナミックな紐結び操作を実現している.そこでは, ロボットの高速性を利用した簡易モデル(代数方程式)を提案し,その有効性を確認している. また,紐の形状から導出できる軌道生成手法を提案した.
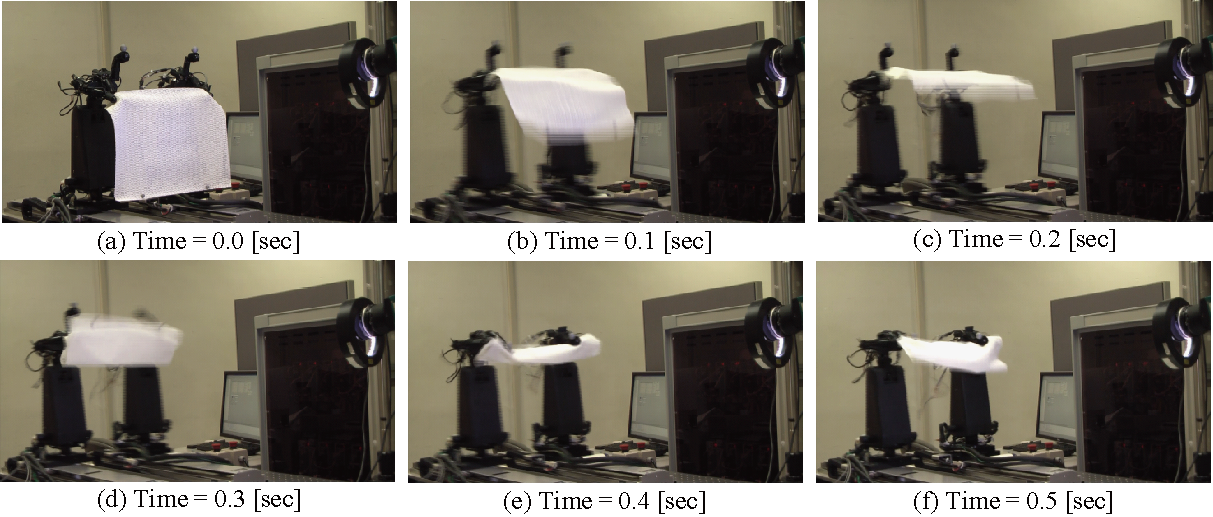
本研究では線状柔軟物体のダイナミックマニピュレーションの発展研究として, 面状柔軟物体のダイナミックマニピュレーション実現を目指す.具体的なタスクとして, 空中での布のダイナミックな折りたたみ動作を行う. はじめに,人間の折りたたみ動作の解析を行い,タスク実現に必要な運動を抽出している. 次に,線状柔軟物体のモデルの拡張として, ロボットの運動から代数的に変形が計算できる布の変形モデルを提案した. 布の変形モデルを用いて,布の目標形状を得るためのロボットの軌道生成手法を提案している. そして,シミュレーションにより,得られた軌道の妥当性を検討している. さらに,タスクの成功率を向上させるために,高速視覚フィードバックを導入している. ロボットハンドの指と布に取り付けたマーカをトラッキングし,2 msごとにマーカ位置と画像面積を 計測することで,布が折りたたまれた瞬間の把持タイミングを検出し,ロバストな把持戦略を提案している. 以上のロボットの軌道と視覚フィードバックを基に実験した結果が下図であり, 約0.4秒での高速な折りたたみ操作が可能である.
動画
参考文献
- 山川雄司,並木明夫,石川正俊 : 2台の高速多指ハンドを用いた布の動的な折りたたみ動作, ロボティクス・メカトロニクス講演会2010/講演会論文集,2A1-F05 (2010)
- 山川雄司,並木明夫,石川正俊 : 高速多指ハンドシステムによる視覚フィードバックを用いた布の動的折りたたみ操作, 第28回ロボット学会学術講演会/予稿集,1O3-6 (2010)
- 山川雄司,並木明夫,石川正俊: 高速多指ハンドシステムによる面状柔軟物体の動的操り, 第16回 ロボティクスシンポジア (指宿,2011.3.15)/講演論文集,pp. 506-511 (2011)
- Y. Yamakawa, A. Namiki and M. Ishikawa: Motion Planning for Dynamic Folding of a Cloth with Two High-speed Robot Hands and Two High-speed Sliders, 2011 IEEE International Conference on Robotics and Automation, (Shanghai, 2011.5.12)/Proceedings, pp.5486-5491 (2011)