


Dynamic Folding of a Cloth using Dual High-speed Multifingered Hands and Sliders
Summary
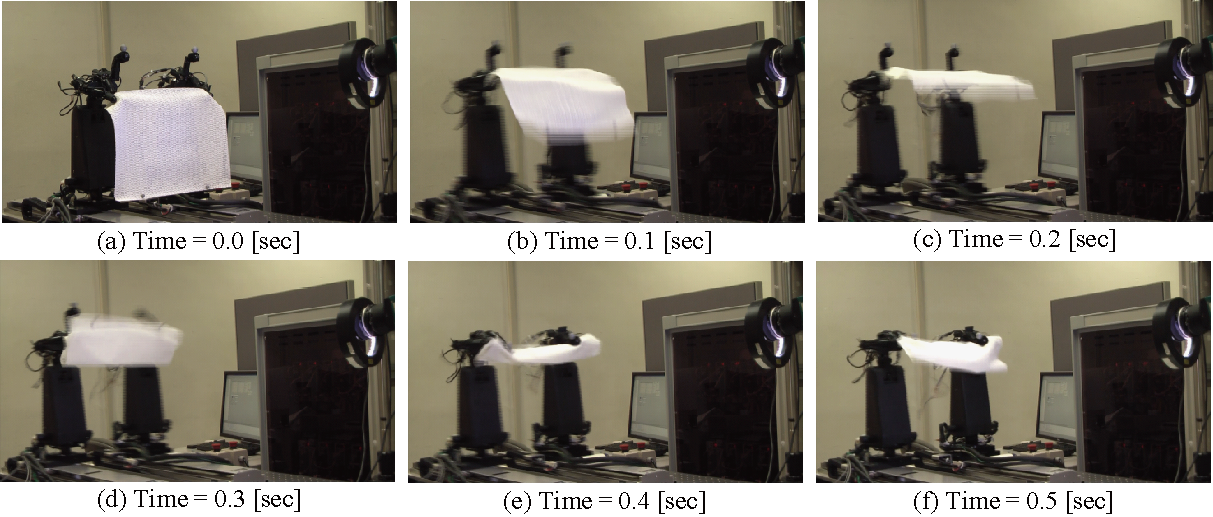
The purpose of this research is to achieve a dynamic manipulation of sheet-like flexible object. As one example of dynamic manipulations of sheet-like flexible object, dynamic folding of a cloth with two high-speed multifingered hands mounted on sliders system will be carried out. First, the dynamic folding by a human is analyzed in order to extract the necessary motion for achievement of this task. Second, a model of the cloth will be proposed by extending the linear flexible object model (algebra equation) using high-speed motion. Third, the motion planning of the robot system will be performed by using the proposed model and the simulation result will be shown. Fourth, a high-speed visual feedback (2 ms) is introduced in order to improve the success rate. Finally, the experiment with the trajectory obtained by the simulation and high-speed visual feedback will be executed.
Movies
References
- Y. Yamakawa, A. Namiki and M. Ishikawa: Dynamic Folding of a Cloth by Two High-speed Multifingered Hands, 2010 JSME Conference on Robotics and Mechatronics, 2A1-F05 (2010)
- Y. Yamakawa, A. Namiki and M. Ishikawa: Dynamic Folding of a Cloth by High-speed Multifingered Hand System using Visual Feedback, The 28th Annual Conference of the Robotics Society of Japan, 1O3-6 (2010)
- Y. Yamakawa, A. Namiki and M. Ishikawa: Dynamic Manipulation of Sheet Flexible Object by High-speed Multifingered Hand System, 16th Robotics Symposia, pp. 506/511 (2011)
- Y. Yamakawa, A. Namiki and M. Ishikawa: Motion Planning for Dynamic Folding of a Cloth with Two High-speed Robot Hands and Two High-speed Sliders, 2011 IEEE International Conference on Robotics and Automation, pp.5486-5491 (2011)