


ホーム >
センサ フュージョン >
動的補償ロボットによる動的塗布の応用
動的補償ロボットによる動的塗布の応用
概要
一般的な産業用ロボットは,速度・精度・不確定要素に対する適応能力三者を同時に成立させることが難しい.これに対して,我々は高帯域でのセンシング・動作によるローカル誤差吸収と低い帯域でのグローバル計画動作を並列に行う動的補償を提唱している.本研究ではこの動的補償に基づいて,コンベア上を流れている事前情報(置く位置・姿勢、塗布形状などの情報を指す)のない部品に対する高精度な塗布作業の実現を可能とするロボットの設計・開発を行う.
図.1で示すように,本研究で実現したロボットは広い範囲を動作するアーム部と狭い範囲内を高速動作が可能なハンド部に分けられる.アーム部は,高い動作精度を求められず,長期間の視点で適した軌道計画およびタスク計画を含む低周波の知能計画に専念する.その一方で,ハンド部は高速フィードバック情報を用いて作業ツールと対象の間のローカル誤差を高周波に吸収する. 評価実験として,コンベアの移動速度を30 mm/s(事前情報として用いない)に設定して,形状や寸法など事前情報がないワーク(2パターン(ワークA,B),一番狭い部分の幅は1.5 mm 程度)を,ワークA,Bの順に任意の姿勢でコンベア上に置き,連続塗布実験を行い,図.2に示した結果の通り,十分に綺麗な塗布(ノズル径は1.0 mm)を実現した.
ロボットの高い動作帯域での精確性および低い動作帯域での適応性を同時に成立させるための動的補償手法の一応用例を通じて,FA・製造ラインの高速化・高精度化・高知能化の実現を示した.
|
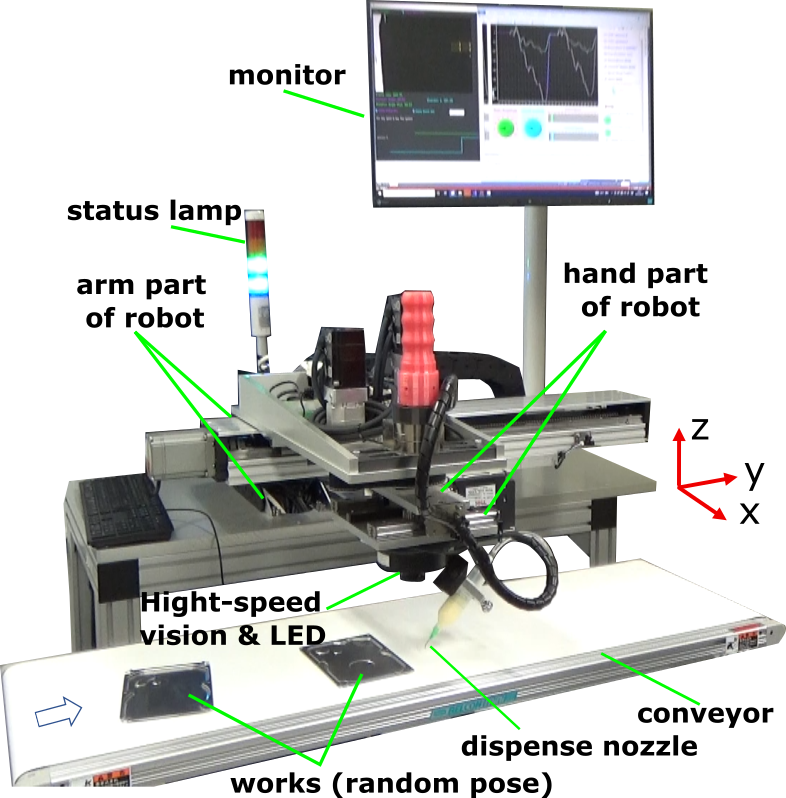
Fig.1 Developed robot system
|
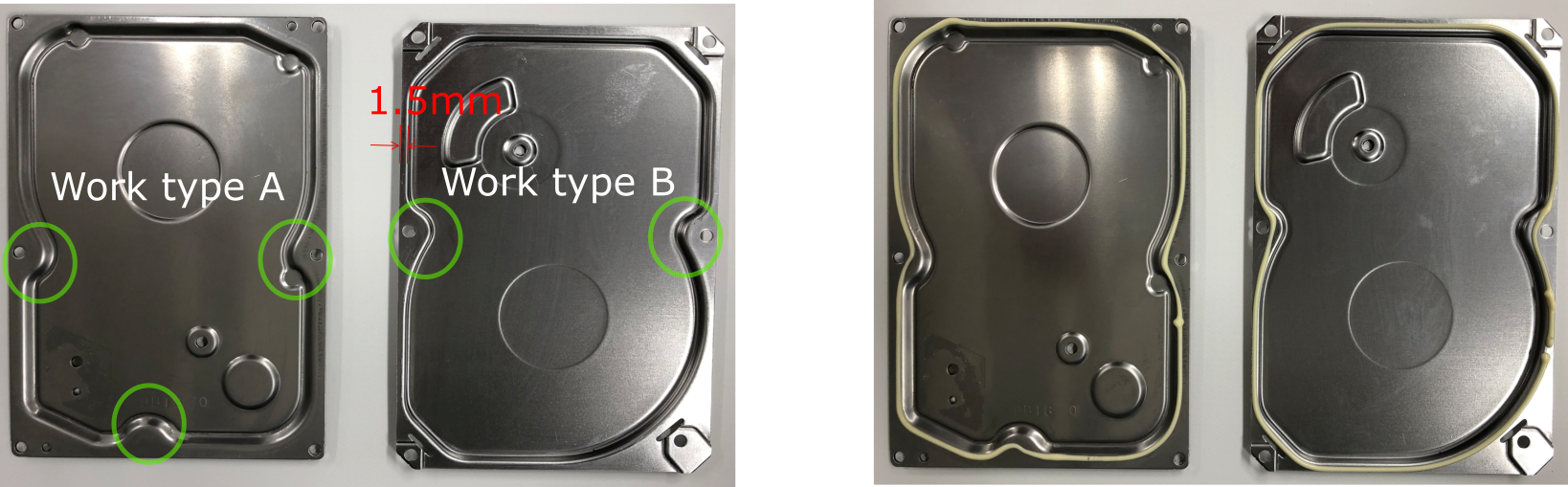
Fig.2 working target before and after dispensing
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 黄守仁, 村上健一, 石川正俊: 対象の事前情報必要としない動的塗布応用に向けたロボットの実現, 第23回計測自動制御学会システムインテグレーション部門講演会(SI2022)(千葉,2022.12.14)/講演会論文集, pp.999-1001 計測自動制御学会 システムインテグレーション部門SI2022 優秀講演賞