Home >
Sensor Fusion >
A sealant dispensing robot for applications with moving targets
A sealant dispensing robot for applications with moving targets
Summary
Traditionally, it is difficult for a general robot to achieve fast speed, good accuracy, and good adaptability to unstructured environment simultaneously.
In this research, we developed a sealant dispensing robot for moving targets of no prior knowledge (shape, placed pose and position, moving speed, etc.) based on our previously proposed dynamic compensation framework. To realize accurate sealant
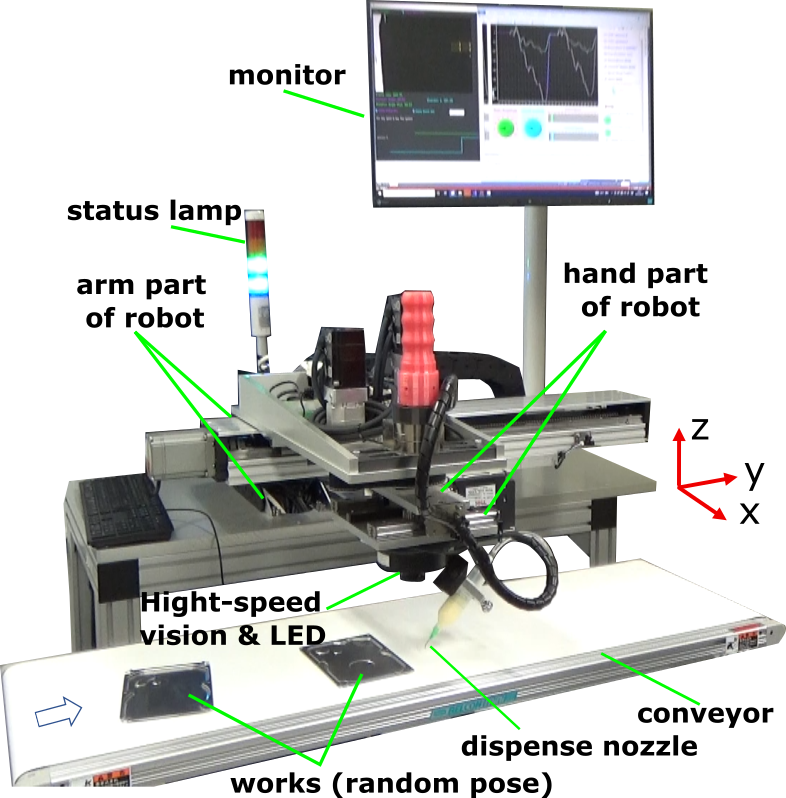
dispensing for works of unknown shape that are randomly placed on a moving conveyor, the robot as shown in Fig.1, was designed
based on a coarse-to-fine strategy such that an arm part (2-DOF) for long-term adaptation of uncertainties in a global manner (global planning), and a hand part (2-DOF) for real-time adaptation of uncertainties in a local manner (real-time error absortion).
Specifically, the hand part was capable of high-speed feedback motion control by utilizing 1,000 fps vision feedback. Primary evaluation results as shown in Fig.2 demonstrated the effectiveness of the developed system.
Fig.1 Developed robot system
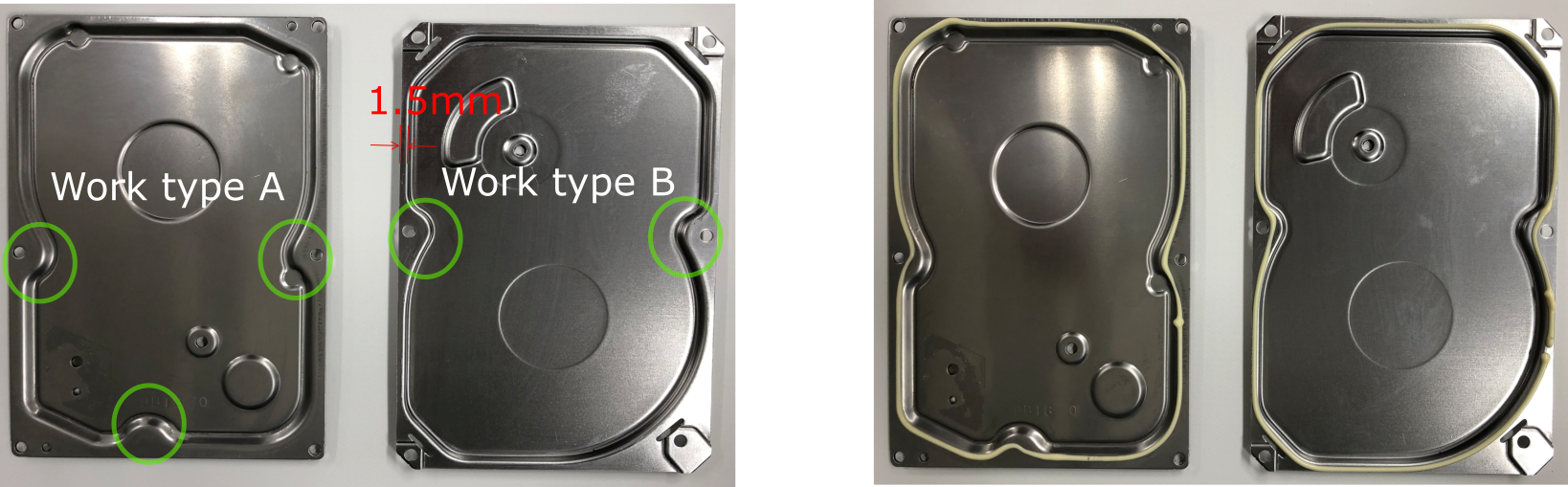
Fig.2 working target before and after dispensing
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact
Reference
Shouren Huang, Kenichi Murakami, Masatoshi Ishikawa. Development of a Sealant Dispensing Robot for Moving Targets of no Prior-Knowledge. The 23th SICE System Integration Division Annual Conference (SI2022), Dec. 14-16, 2022