


高速ビジョンとロボットハンドを用いた人間協調システム
概要
近年,ロボットの研究開発が目覚しく,人間の生活環境にロボットが導入されつつある. このことは人間とロボットの共存の必要性を意味している. ロボット単体で行うような動作がある一方で,人間とロボットの共存という観点では人間とロボットが同じ作業を行うことは興味深い.
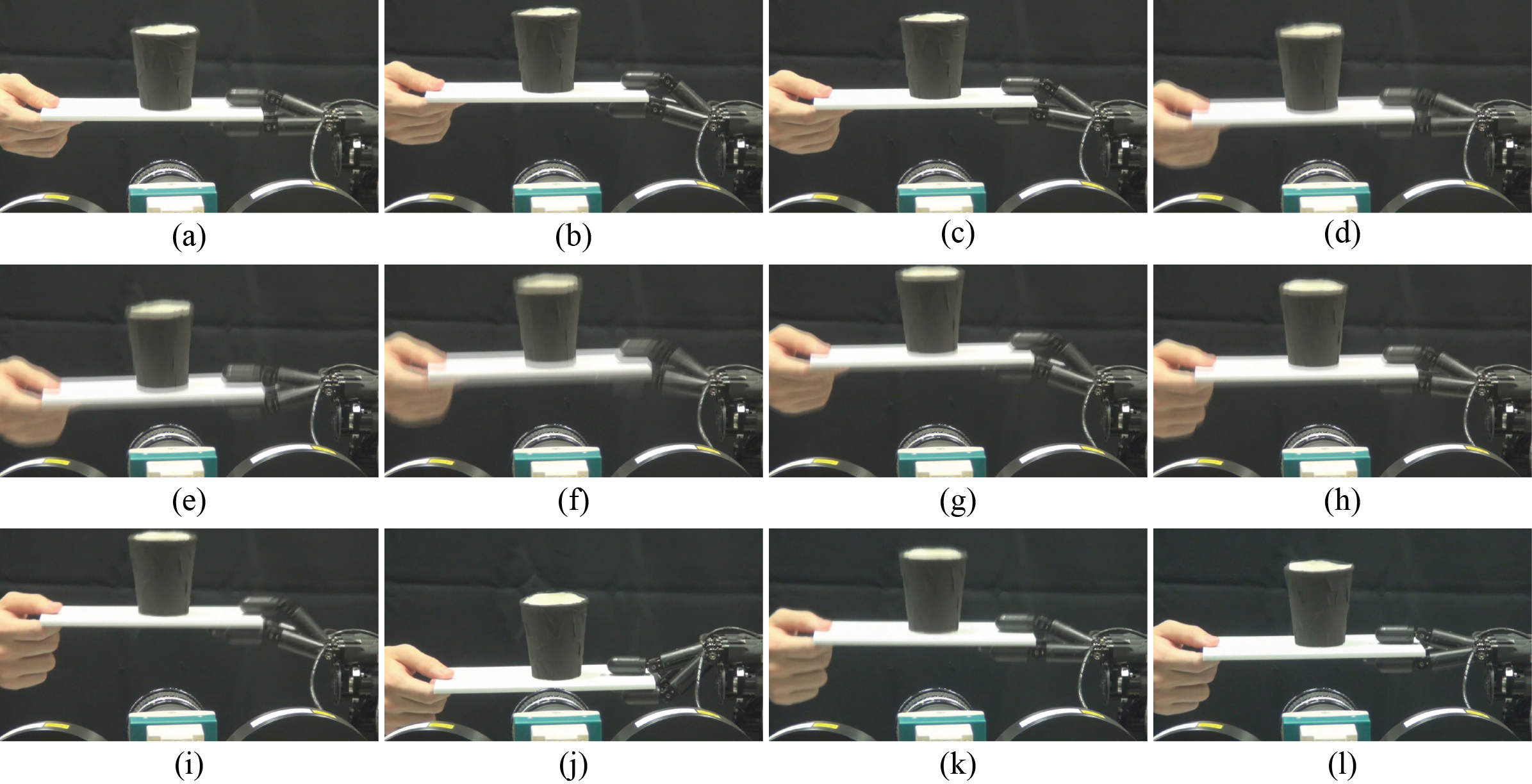
そこで本研究では,ロボットハンドと人間の協調作業,特にロボットハンドと人間が共同で板状の物体を傾けないように支えるという動作を目標とした. 具体的には人間が物体の一端,ロボットハンドが他端を持ち,物体を水平に支えるというタスクを想定し,これを高速ロボットハンドシステムを用いて実現した.
|
| 図1. 協調タスクの実験結果(連続写真) |
|---|
動画
参考文献
- Yuji Yamakawa, Kazuki Kuno and Masatoshi Ishikawa: Human–Robot Cooperative Task Realization Using High-speed Robot Hand System, 2015 IEEE International Conference on Advanced Intelligent Mechatronics (Busan, Korea, 2015.7.8) /Proceedings, pp.281-286 (2015)