


Home >
Sensor Fusion >
Human-Robot Cooperative System using a High-speed Vision System and a Robot Hand
Human-Robot Cooperative System using a High-speed Vision System and a Robot Hand
Summary
Recently, robotics research and development have been done actively, and some robots are introduced in human life environment. This means that cooperation between human and robot is significantly important. And it is very interested in human-robot cooperation in that context.
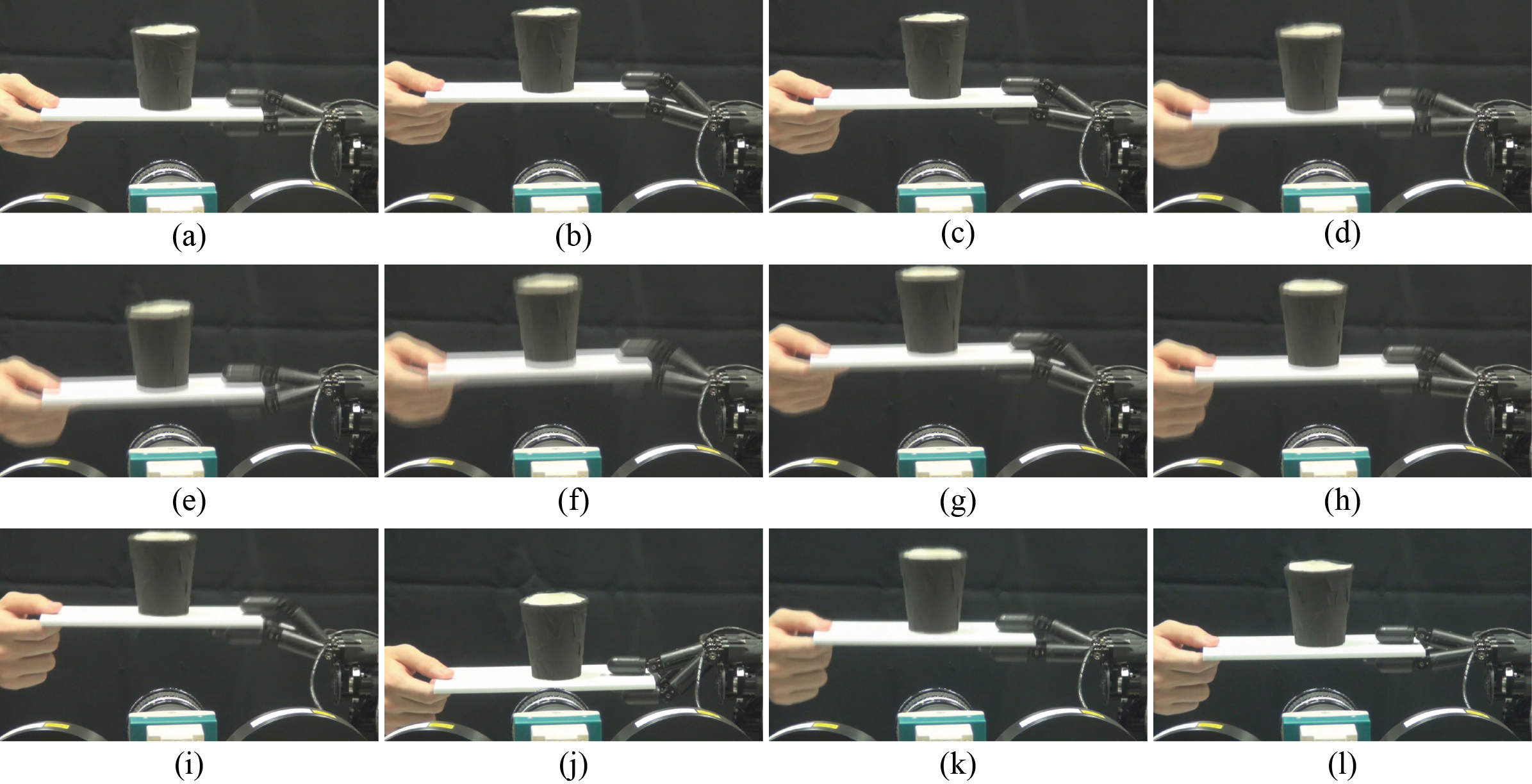
In this research, we aim at a realization of human-robot cooperative task that the board which is grasped by a human subject and a robot hand is controlled to be keep horizontally. By using the high-speed robot hand system, we achieved this task robustly.
|
| Figure 1. Experimental result of cooperative task (continuous photos) |
|---|
Movie
Reference
- Yuji Yamakawa, Kazuki Kuno and Masatoshi Ishikawa: Human–Robot Cooperative Task Realization Using High-speed Robot Hand System, 2015 IEEE International Conference on Advanced Intelligent Mechatronics (Busan, Korea, 2015.7.8) /Proceedings, pp.281-286 (2015)