


高速多指ハンドを用いたケーブル・コネクタの配線操作
概要
現在FA・製造ラインの高速化,高精度化の要求がある.例えば,自動車生産 ラインでケーブル・コネクタを扱う作業においては自動化がなされておらず,作業者による人手に頼っている.
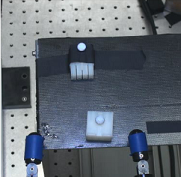
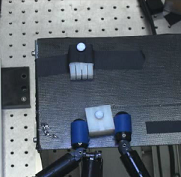
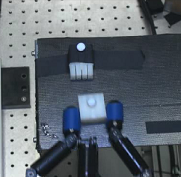
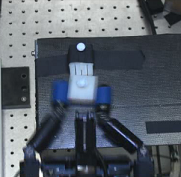
本研究では、高速カメラで取得したコネクタの位置情報をもとに多指ロボットハンドを用いて高速なコネクタの把持・挿入動作を実現する.
高速に運搬されるコネクタの位置を高フレームレートで取得し,挿入が行われる手前でコネクタに微小な振動を加えることで 挿入時の微小な位置のずれを緩和する.
動画
参考文献
- 玉田智樹,山川雄司,妹尾拓,石川正俊: 多指ハンドを用いたケーブル・コネクタの高速配線操作, 第13回 計測自動制御学会 システムインテグレーション部門講演会,(福岡,2012.12.19)/講演会論文集, pp. 1810-1811 (2012)
- Tomoki Tamada, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: High-Speed Manipulation of Cable Connector Using a High-Speed Robot Hand, Robio Conference 2013, (ShenZhen, 2013.12.14)/Proceedings, pp.1598-1604 (2013)