


Home >
Sensor Fusion >
Connecting manipulation of cable and connector by high-speed multi-fingered hand<
Connecting manipulation of cable and connector by high-speed multi-fingered hand
Summary
Higher speed and accuracy are recently required in manufacturing and FA lines.
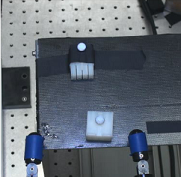
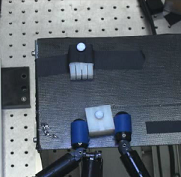
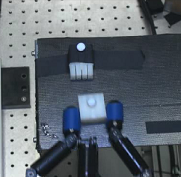
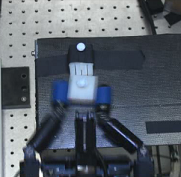
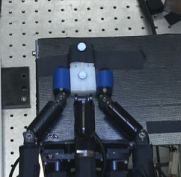
In this research,we propose a method of manipulation of connectors and cables , the coordinates of which are detected by high-speed visual-servo system. The high-speed robot hand rapidly carries the position of one connector which is tracked by high-speed camera, and then solves the tiny position error between connectors by adding connector a slight vibration before beginning insertion to the other connector.
Movie
Reference
- T.Tamada,Y.Yamakawa,T.Senoo and M.Ishikawa: Connecting manipulation of cable and connector by high-speed multi-fingered hand ,13th SICE System Integration Division Annual Conference(SI2012).(Fukuoka,Japan,2012.12.19)/Proceedings, pp. 1810-1811
- Tomoki Tamada, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: High-Speed Manipulation of Cable Connector Using a High-Speed Robot Hand, Robio Conference 2013, (ShenZhen, 2013.12.14)/Proceedings, pp.1598-1604 (2013)