


ホーム >
センサ フュージョン > 高速多指ハンドによるカードの変形を利用した操り
高速多指ハンドによるカードの変形を利用した操り
概要
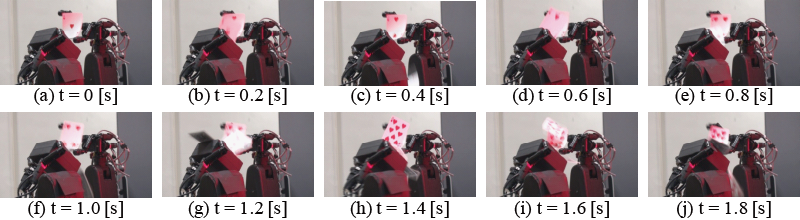
本研究では面状弾性物体のダイナミックマニピュレーションとして, カードの変形を利用した操りの実現を目的としている.具体的なタスクとして, カードを変形させ,カードのひずみエネルギを用いることによりカード飛ばしを実現し, その飛ばされたカードをキャッチすることである.
カード飛ばしは高速多指ハンドの指先の高速振動を利用することにより実現され, カードキャッチは高速ビジョンを用いてカードの位置を認識し, その位置にロボットを動かすことにより実現されている.
カード飛ばしについては,カードとハンド指先の間の滑り条件について考察し, その滑り条件を基に高速振動の有効性を確認している. また,カードの変形による弾性エネルギから運動エネルギへの遷移についても理論的に考察し, カードが飛び出す方向とその速度を導出している.
動画
参考文献
- 山川雄司,並木明夫,石川正俊: 高速ロボットハンドの指先高速振動を用いたカード飛ばし, ロボティクス・メカトロニクス講演会2012, (浜松,2012.5.28)/講演論文集,1A1-J04 (2012)
- Yuji Yamakawa, Akio Namiki and Masatoshi Ishikawa: Card Manipulation using a High-speed Robot System with High-speed Visual Feedback, 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, (Vilamoura, 2012.10.10)/Proceedings, pp.4762-4767 (2012)
- 山川雄司,並木明夫,石川正俊: 高速多指ハンドシステムを用いたカード操り, 第13回 計測自動制御学会 システムインテグレーション部門講演会, (福岡,2012.12.19)/講演会論文集,pp. 1806-1809 (2012)