


Home >
Sensor Fusion >
Card Manipulation using Card Deformation by a High-speed Multifingered Hand
Card Manipulation using Card Deformation by a High-speed Multifingered Hand
Summary
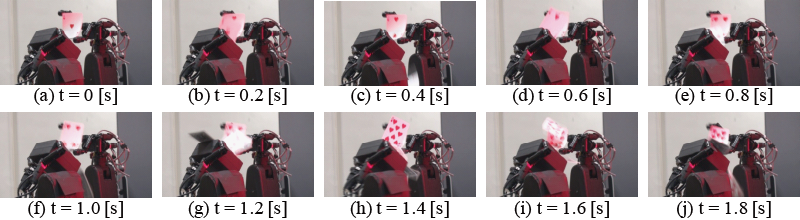
A purpose of this study is to achieve a card manipulation using a card deformation as one example of dynamic manipulations of a sheet-like elastic objects. In particular, we aim at a card flicking with the card deformation and a card catching using a high-speed visual feedback control.
The card flicking is performed by using a fingertip high-speed vibration. And the card catching is carried out so as to match the positions of the card and the robot with the high-speed visual feedback.
Movies
Reference
- Yuji Yamakawa, Akio Namiki and Masatoshi Ishikawa: Card Manipulation using a High-speed Robot System with High-speed Visual Feedback, 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, (Vilamoura, 2012.10.10)/Proceedings, pp.4762-4767 (2012)