


ホーム >
センサ フュージョン > 高速多指ハンドとビジョンシステムを用いたカードシューティング
高速多指ハンドとビジョンシステムを用いたカードシューティング
概要
本研究では面状弾性物体の器用な操りを目指して,高速ロボットシステムを用いたカード操りを目的としています. 特に,高速ロボットハンドとビジョンシステムによって,対象物体に向けてカードを器用に投擲することを実現しています. その実現に向けて,はじめに人間によるカード投げを分析するとともに,初期状態におけるカード把持を解析し, タスクを実現するための基本的な戦略を提案しています. また,カードの把持位置や目標とする方向へカード投擲を行うためのリリースタイミングについて調査し, 適切な把持位置およびリリースタイミングを実験的に導出しています. 最後に,提案手法を用いて,カード投げや対象へのカード投擲を実現しています.
|
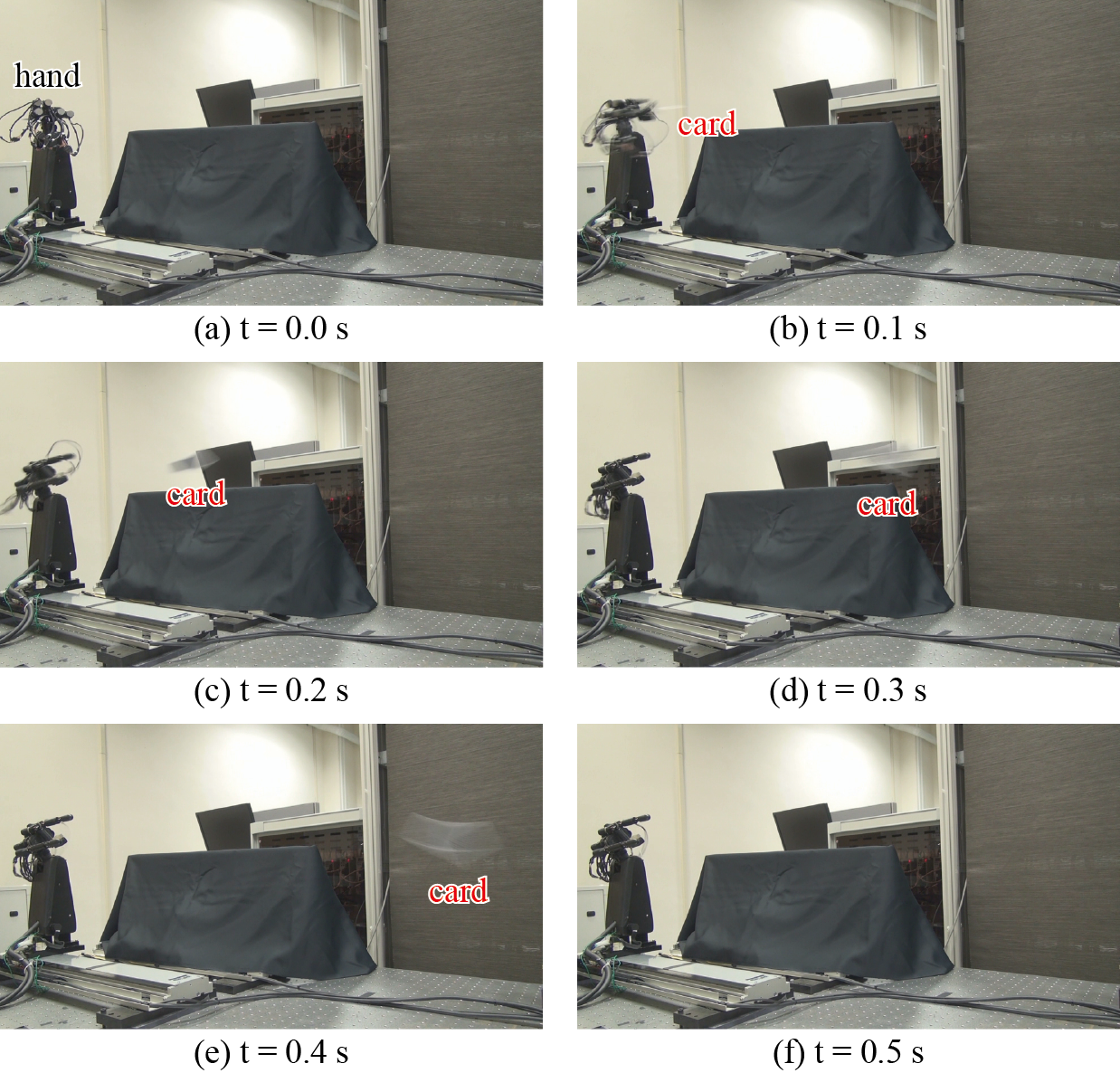
| 図1. カード投げの実験結果(連続写真) |
|---|
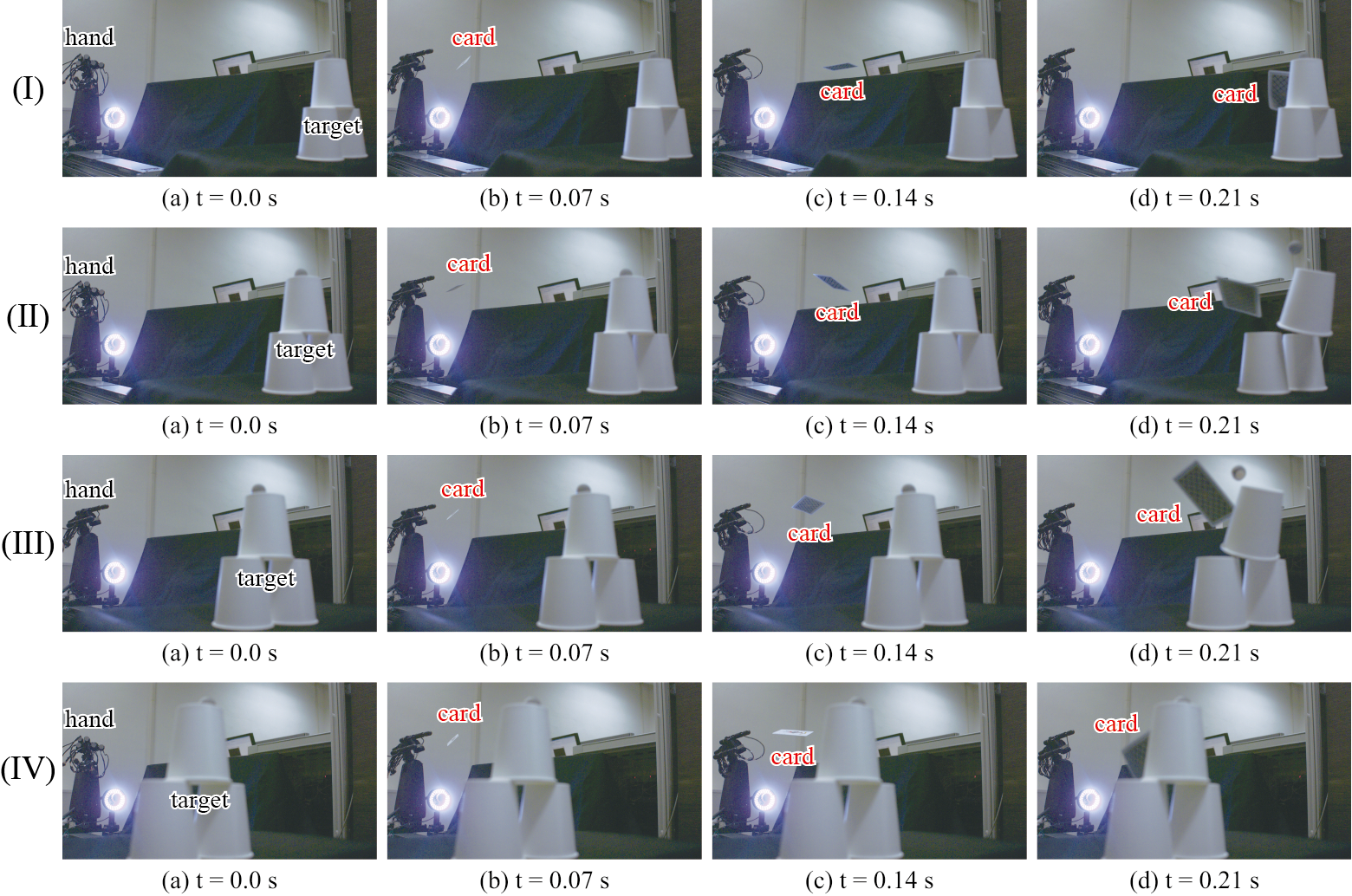
|
| 図2. カップへのカード投擲の実験結果(連続写真) |
動画
参考文献
- Yuji Yamakawa, Kazuki Kuno and Masatoshi Ishikawa: Throwing and Shooting Manipulations of Playing Cards using a High-Speed Multifingered Hand and a Vision System, 2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), (Madrid, Spain, 2014.11.19)/Proceedings, pp.92-98 (2014)