


Card Throwing and Shooting by a High-speed Multifingered Hand and a Vision System
Summary
We successfully demonstrated dexterous manipulation of sheet-like elastic objects, namely, playing cards, using a high-speed robot system. In particular, our goal was to achieve card throwing and card shooting of a target object by a high-speed multifingered robot hand and a visual feedback based on a vision system. We discuss card grasping in the initial state by analyzing a motion of a human subject for achieving card throwing, and we propose a strategy for card throwing and card shooting. We also explore a grasping position of a card and a release timing to perform the card throwing toward a desired direction. Finally, we show experimental results of card throwing and card shooting of target objects, such as a static cup, a static pen and a moving cup, without/with visual feedback.
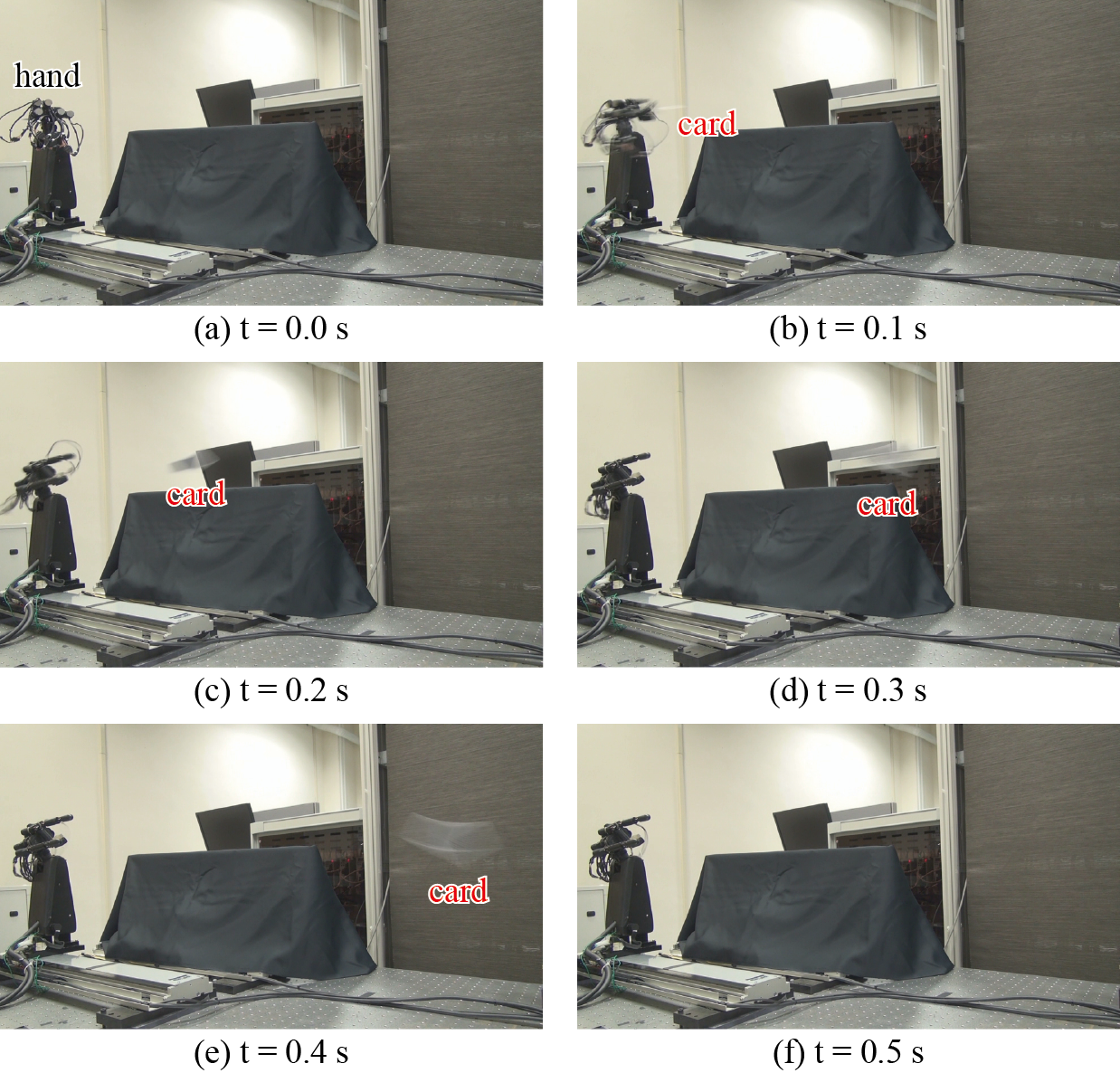
|
| Figure 1. Experimental result of card throwing. |
|---|
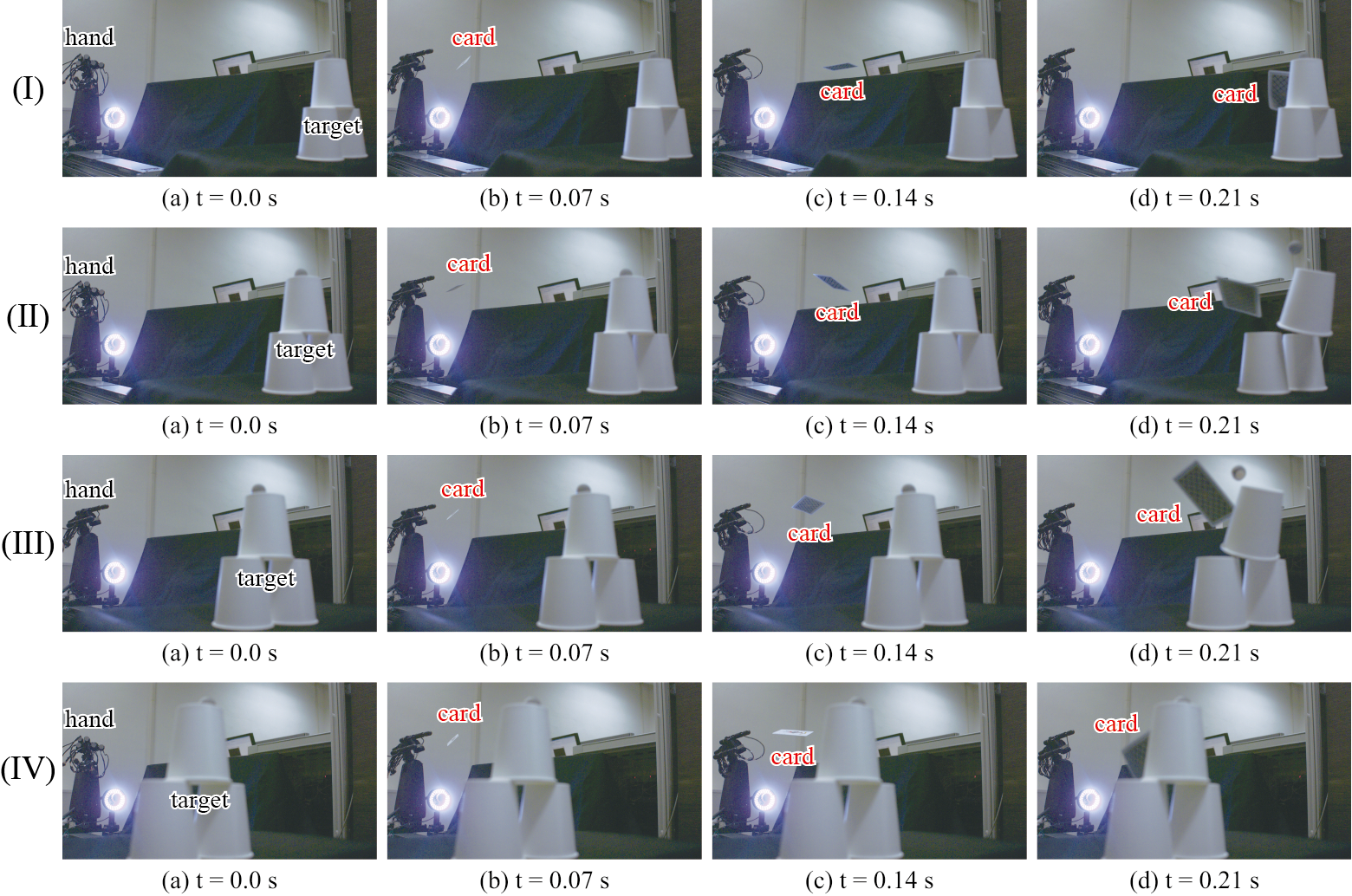
|
| Figure 2. Experimental results of card shooting of a cup. |
Movie
Reference
- Yuji Yamakawa, Kazuki Kuno and Masatoshi Ishikawa: Throwing and Shooting Manipulations of Playing Cards using a High-Speed Multifingered Hand and a Vision System, 2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), (Madrid, Spain, 2014.11.19)/Proceedings, pp.92-98 (2014)