


ホーム >
センサ フュージョン > ロボットハンドを用いた糸・ロータ系の回転操作
ロボットハンドを用いた糸・ロータ系の回転操作
概要
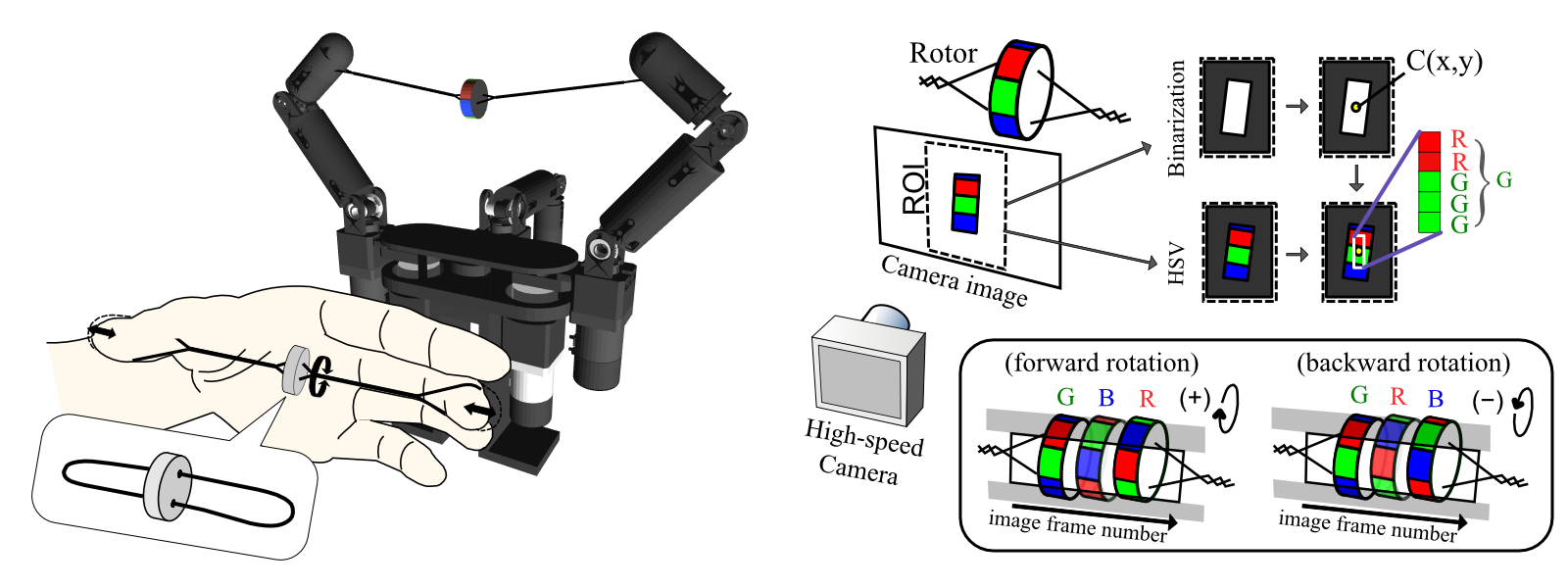
ボタン・スピナー(ぶんぶん独楽)は、回転子と糸の輪で構成された、ヨーヨーに類似した玩具である。ボタン・スピナーをプレーする時、周期的に振動する指先の動きに応じて、6,000RPMという非常に高速な回転子の回転が生じる。回転力は捻られた糸により、指先から回転子にまで伝達される。 柔軟物による動力伝達は、簡単な構造及び柔軟な動作を特徴とし、低速且つ線形的な指先の動きを高速回転運動に換える手法として期待される。この動力伝達を活用するためには、柔軟物による非線形システムの不確定性の下でも安定的に力が制御できる必要がある。 高速なセンシング系とマニピュレーターで構成されたロボットシステムを導入することで、前述したような非線形系を推定なしでも比較的に簡単に制御することができる。
本研究では、上記の高速ロボットシステムを利用して、ロボットハンドによるボタン・スピナーを成功的に実現した。その際、回転子の回転角度だけではなく糸上における滑りなどを抑制しながら、回転軸方向の位置制御も実現できた。制御誤差としては回転角についてはセンシング分解能以下、回転子の位置については5ピクセル(約0.8mm)以下が達成できた。 ボタン・スピナーの核となる機構は撹拌器や発電機などの高速回転系のみならず、一般的な工作機械にも応用できると期待できる。
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 金賢梧, 山川雄司, 妹尾拓, 石川正俊: 柔軟物のねじりを利用した多指ハンドによる軸対象物の回転制御,第14回計測自動制御学会システムインテグレーション部門講演会,(神戸,2013.12.19)/講演会論文集, pp. 1192-1194 (2013)
- H. Kim, Y. Yamakawa, T. Senoo, and M. Ishikawa: Manipulation Model of Thread-Rotor Object by a Robotic Hand for High-speed Visual Feedback Control, 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2014) (2014.7.9)/Proceedings, pp.924-930
- H. Kim, Y. Yamakawa, T. Senoo, and M. Ishikawa: Robotic Manipulation of Rotating Object via Twisted Thread Using High-Speed Visual Sensing and Feedback, 2015 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI2015) (San Diego, 2015.9.16)/Proceedings, pp.265-270