


Manipulation of Thread-Rotor Object by a Robotic hand
Summary
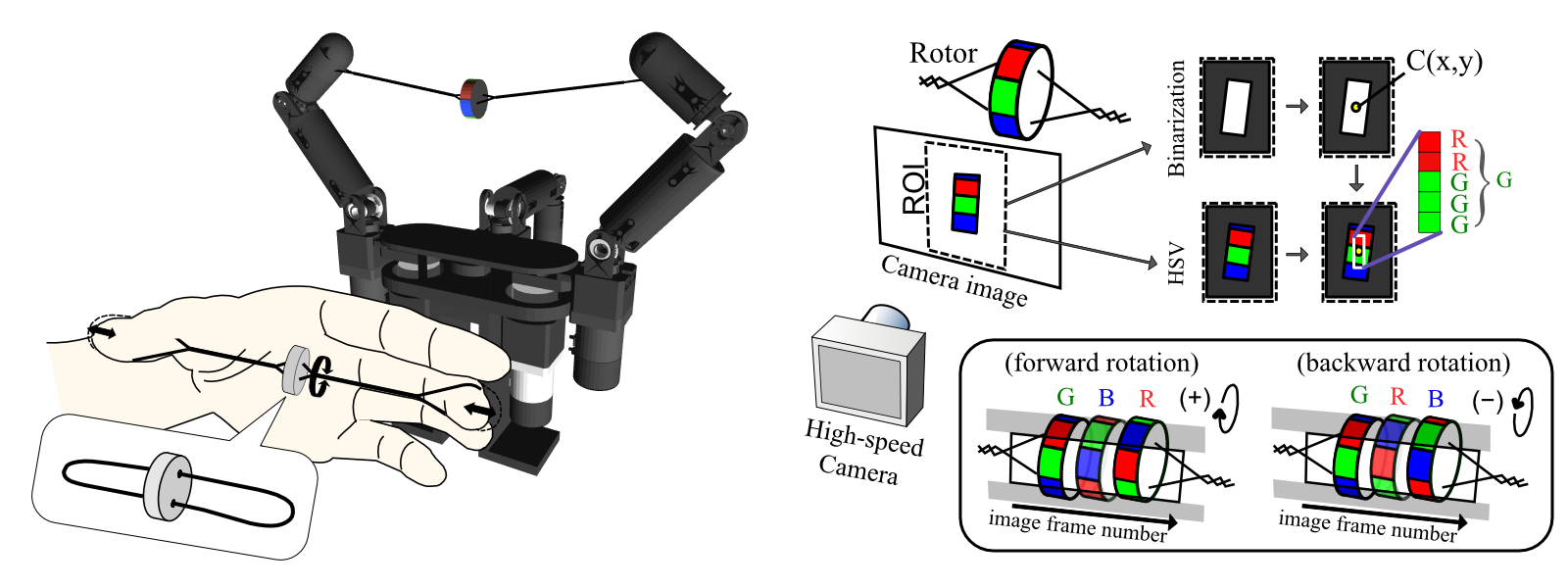
Button spinner, a hand-toy similar to Yo-Yo, consists of a loop of thread and a button as a rotor. When we play a button spinner, the rotor spins at very high speed, up to 6,000 rpm, according to the periodic and oscillating finger motion, by the power transferred through a pair of twisted thread. The power transmission via flexible objects, which converts slow and linear motion to high-speed rotation is a promising method, because of the simple mechanism and smooth behavior due to its flexibility. However, to take advantage of the power transmission, we need to regulate the power stably, under the uncertainties of non-linear system which is caused by its flexible components. By introducing the high-speed robotic system in sensing and manipulation, we can easily control the related systems without any estimation.
In this research, with the high-speed robotic system, we successfully conducted the robotic button spinner and were able to control not only the rotation angle but also the position of the rotor along the thread. The control error was less than the resolution of measurement in angular position, and less than 5 pixels (about 0.8 mm) in the position of the rotor along the thread. The core structure of the button spinner can be applied to not only high speed rotating systems such as a shaker and a generator, but also machine control.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- H. Kim, Y. Yamakawa, T. Senoo and M. Ishikawa: Spin control of an axial symmetric object with flexible thread using a multifingered hand, 14th SICE System Integration Division Annual Conference(SI2013).(Kobe,Japan,2013.13.19)/Proceedings, pp. 1192-1194
- H. Kim, Y. Yamakawa, T. Senoo, and M. Ishikawa: Manipulation Model of Thread-Rotor Object by a Robotic Hand for High-speed Visual Feedback Control, 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2014) (2014.7.9)/Proceedings, pp.924-930
- H. Kim, Y. Yamakawa, T. Senoo, and M. Ishikawa: Robotic Manipulation of Rotating Object via Twisted Thread Using High-Speed Visual Sensing and Feedback, 2015 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI2015) (San Diego, 2015.9.16)/Proceedings, pp.265-270