


ロボットハンドアームを用いた変化球のための回転操り動作分析
概要
本研究では,高速ダイナミックマニピュレーションの実現を目的として,高速多指ハンド・アームを用いた変化球の投球に取り組む. ボールの回転を考慮した投球動作を扱った先行研究はいくつか行われているが,本研究ではボールの回転数を大きくすることを中心に研究を進める. また,スポーツ科学の分野で変化球の投球法を科学的に解析するために計測や研究が行われているが,どのような体の動きがボールの回転に関係しているのかは明らかにされていない. そこで,本研究では,投球動作を指の上でのボールの回転運動を中心にモデル化し,人の投球との比較やボールの回転に影響を与えている要素の調査を行う.
図1. 概要
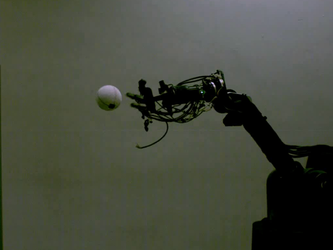
図2.(a) 投球動作 0[ms]
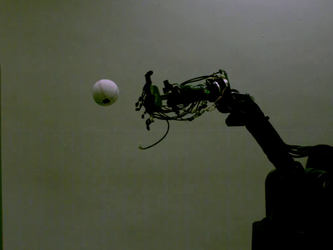
図2.(b) 投球動作 14[ms]
動画
参考文献
- 村上健一,山川雄司,妹尾拓,石川正俊:ロボットハンドアームを用いた変化球のための回転操り動作分析, 日本機械学会ロボティクスメカトロニクス部門講演会2014 (富山, 2014.5.28) / 講演論文集, 3P1-P03
- Kenichi Murakami, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: Rolling Manipulation for Throwing Breaking Balls by Changing Grasping Forms, 2016 IEEE INDUSTRIAL ELECTRONICS CONFERENCE (IECON2016), (Florence, Italy, 2016.10.26) / Proceedings, 1948