


Home >
Sensor Fusion > Analysis of Rolling Manipulation
for Breaking Ball Throwing with Robot Hand-Arm
Analysis of Rolling Manipulation for Breaking Ball Throwing with Robot Hand-Arm
Summary
The purpose of the work is to achieve high-speed dynamic manipulation. As one example, we deal with a breaking ball throwing. There are some previous researches about throwing with ball spin, but we will especially concentrate on making spin rate bigger. There are also some studies and measurements to analyze pitching technique scientifically, However little is known about body motions affecting ball spin. In this research, we modelize throwing motion as swing motion of a accelerating 1 DOF link and compare simulation results with human throwing.
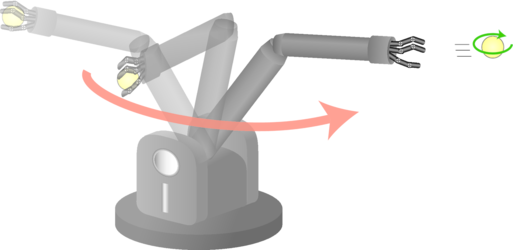
Fig.1 Overview
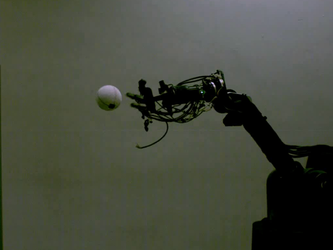
Fig.2 (a) Throwing 0[ms]
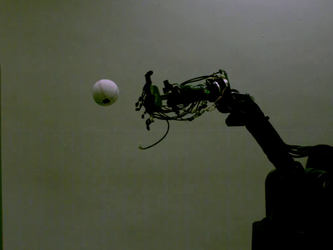
Fig.2 (b) Throwing 14[ms]
Movie
References
- K. Murakami, Y. Yamakawa, T. Senoo and M. Ishikawa: Analysis of Rolling Manipulation for Breaking Ball Throwing with Robot Hand-Arm, 2014 JSME Conference on Robotics and Mechatronics(ROBOMEC2014).(Toyama, Japan, 2014. 5. 28)/Proceedings, 3P1-P03
- Kenichi Murakami, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: Rolling Manipulation for Throwing Breaking Balls by Changing Grasping Forms, 2016 IEEE INDUSTRIAL ELECTRONICS CONFERENCE (IECON2016), (Florence, Italy, 2016.10.26) / Proceedings, 1948