両腕同期運動を利用した力覚提示による人間機械協調
概要
人間は両腕協調運動を利用して様々かつ複雑な作業を実現している.人間の両腕を協調させて動かすために,邪魔をしながらも協調しあうことが可能になるといった脳のメカニズムが存在すると考えられる.特に,両腕の同期運動(例えば,左右の手(腕)で異なった運動を同時に行おうとしても,両手が同じような動きになる傾向)は日常生活中にも良く見られて,両腕の同期制御は脳にとって最も基本的な仕組みとも考えられる.本研究では人間機械協調に関する先行研究に基づいて,人間両腕同期運動を利用した力覚提示による人間機械協調の研究を行う.
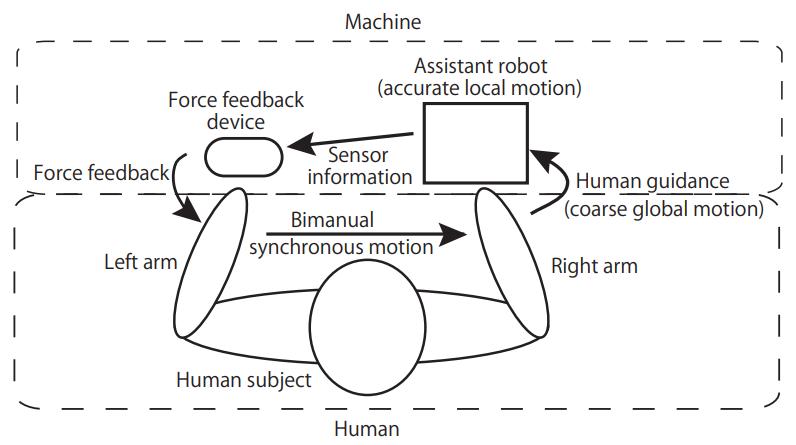
本研究のコンセプトはFig.1で示すように,人間と機械二つの対象の関係を表している.機械側はアシスタントロボットと力覚提示デバイスにより構成されている.アシスタントロボットには高速ビジョンと高速アクチュエータが備えられ,一定範囲内での高速高精度位置決めができる.作業対象を常にアシスタントロボットの動作範囲内に限定するように,力覚提示を通じて人間のグローバル動作を調整させる.具体的には,高速アクチュエータの位置情報などに基づいて人間の左手に握られた力覚提示デバイスを適切な動作を駆動するより,左手に与えられた力で動作方向・動作範囲を提示し,人間はその提示に合わせて左腕を動かす.それと同時に,右腕も左腕と同期運動を行うことにより,右手に握られているアシスタントロボットはグローバル動作を実行する.アシスタントロボットは力覚提示による粗い精度のグローバル動作(パッシブ動作)と高速高精度のローカル位置決め(アクティブ動作)を同時並行に行うことにより,作業対象に対する高精度作業を実現する.
軌道トレーシングのタスクに対して,初期の評価実験を行い,両腕同期運動を利用した力覚提示の有効性を示した.
Fig.1 Concept of this study
Fig.2 Experimental system
参考文献
- Shouren Huang, Keisuke Koyama, Masatoshi Ishikawa, and Yuji Yamakawa. 2021. Human-Robot Collaboration with Force Feedback Utilizing Bimanual Coordination. In Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’21 Companion), March 8–11, 2021, Boulder,CO, USA. ACM, New York, NY, USA, 5 pages. https://doi.org/10.1145/3434074.3447166
- Shouren Huang, Keisuke Koyama, Masatoshi Ishikawa, Yuji Yamakawa: Human-Robot Collaboration with Force Feedback Utilizing Bimanual Synchronous Motion,2019 JSME Conference on Robotics and Mechatronics(ROBOMECH2020),(Kanazawa,2020.5.29)/Proceedings, 2A2-C14 (In Japanese) (2020)