Home >
Sensor Fusion >
Human-Robot Collaboration with Force Feedback Utilizing Bimanual Coordination
Human-Robot Collaboration with Force Feedback Utilizing Bimanual Coordination
Summary
Humans realize various complex tasks with their upper limbs based on bimanual coordination. A fundamental feature of our bimanual coordination is the natural tendency to synchronize the upper limbs, resulting in preferred symmetrical patterns of interlimb coordination. In this early-stage study, based on the coarse-to-fine human-robot collaboration framework, we investigate the possibility of human-robot collaboration for accurate manipulation under force feedback utilizing the bimanual synchronous mechanism.
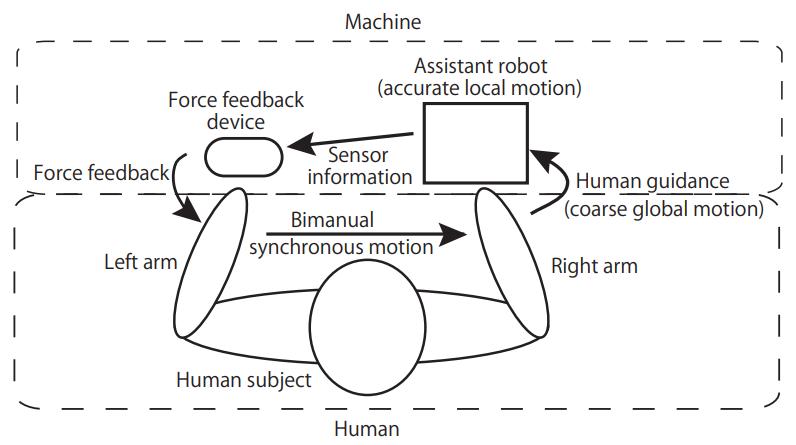
The concept of this study is shown in Fig.1. The human-robot collaboration is realized by the integration of the machine side (consisting an assistant robotic module and a force feedback device) for accurate local motion and the human side for coarse global motion. High-speed sensory feedback and high-speed actuators are utilized in the assistant robotic module, to realize high bandwidth feedback control in a limited work range. The human side guides the assistant robotic module in a global motion manner such that a manipulation target should be always kept within the work range of the assistant robotic module, under force feedback. Force feedback generated by a device based on the sensor information of the assistant robotic module is provided to the left hand of the human operator. The human operator percepts the force feedback information and moves the left arm according to the force feedback protocol. At the same time, he/she moves the right hand, which is holding the assistant robotic module, to conduct the same motion as the left arm, forming the naturally synchronous bimanual coordination. Therefore, a closed-loop for coarse global motion with the aim of keeping the target to be always within the work range of the assistant robotic module is realized. On the other hand, accurate local motion by the assistant robotic module is implemented simultaneously, forming the human-robot collaboration in a coarse-to-fine manner.
Primary results suggested the effectiveness of the proposed method.
Fig.1 Concept of this study
Fig.2 Experimental system
Reference
- Shouren Huang, Keisuke Koyama, Masatoshi Ishikawa, and Yuji Yamakawa. 2021. Human-Robot Collaboration with Force Feedback Utilizing Bimanual Coordination. In Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’21 Companion), March 8–11, 2021, Boulder,CO, USA. ACM, New York, NY, USA, 5 pages. https://doi.org/10.1145/3434074.3447166
- Shouren Huang, Keisuke Koyama, Masatoshi Ishikawa, Yuji Yamakawa: Human-Robot Collaboration with Force Feedback Utilizing Bimanual Synchronous Motion,2019 JSME Conference on Robotics and Mechatronics(ROBOMECH2020),(Kanazawa,2020.5.29)/Proceedings, 2A2-C14 (In Japanese) (2020)