


Home >
Sensor Fusion >
Dynamic Horizontal Movement of a Bipedal Robot Using Frictional Asymmetry
Dynamic Horizontal Movement of a Bipedal Robot Using Frictional Asymmetry
Research
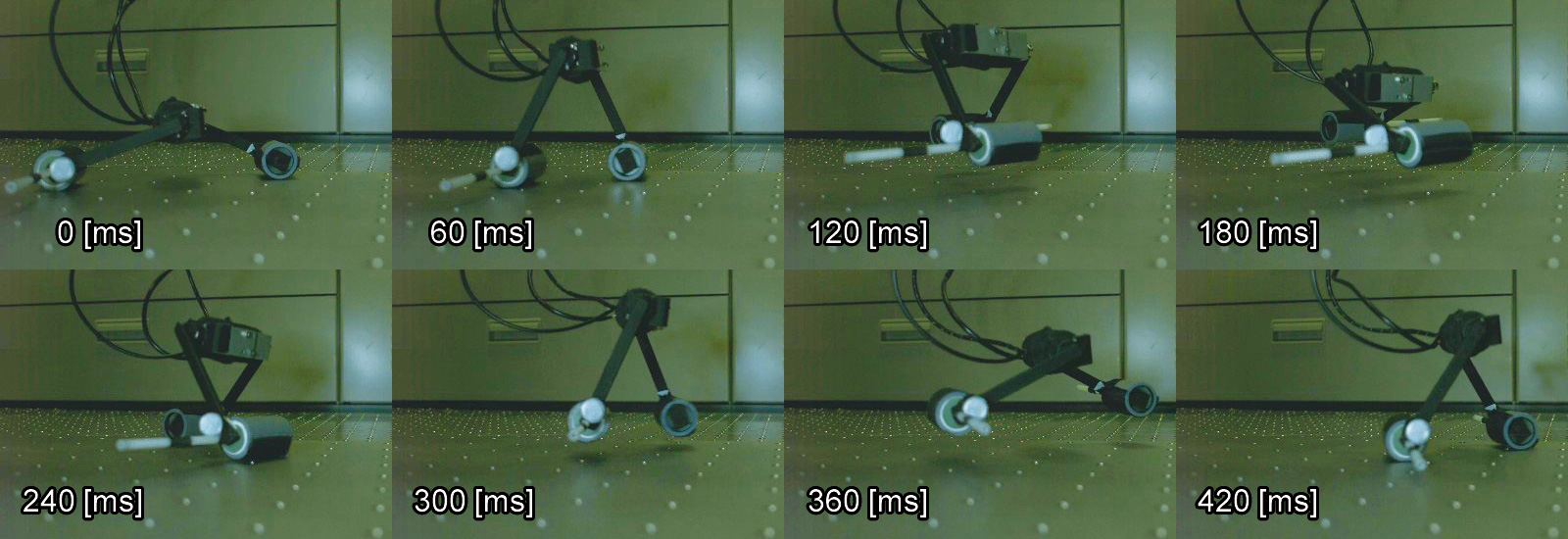
In this research, dynamic horizontal movement is considered with the goal of achieving high-speed dynamic leg motion. We propose a new movement principle using frictional asymmetry for legged robots. This motion strategy consists of sliding motion based on the kinematic constraint and jumping motion which makes use of lightweight high torque motors. In addition, motion characteristics based on the dynamics are analyzed. Experimental results are also shown in which a 2-DOF bipedal robot takes fast short steps repetitively with compensation of landing time by high-speed visual feedback control.
Movies
References
- Taku Senoo, Mitsuhiro Takano and Masatoshi Ishikawa: Dynamic Biped Locomotion Using Asymmetry of Sliding Friction. Journal of the Robotics Society of Japan, Vol.31, No.3, pp.301-309, 2013.
- Taku Senoo, Mitsuhiro Takano and Masatoshi Ishikawa: Dynamic Horizontal Movement of a Bipedal Robot Using Frictional Asymmetry. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. (Vilamoura, Portugal, 2012.10.9) / Proceedings, pp.1834-1839.