


ホーム >
センサ フュージョン > 高速アクティブビジョンシステムによる位置計測の高精度化
高速アクティブビジョンシステムによる位置計測の高精度化
概要
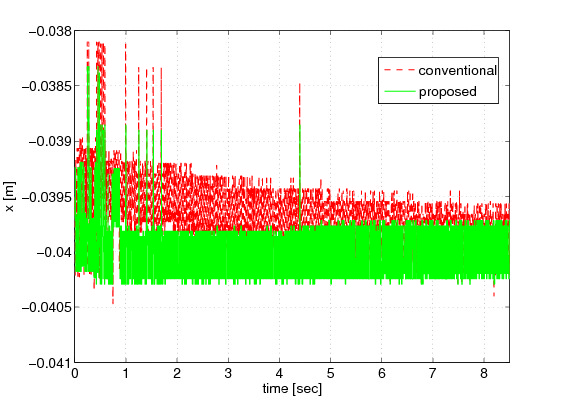
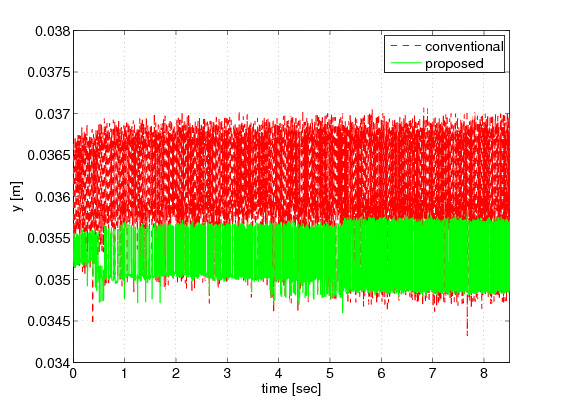
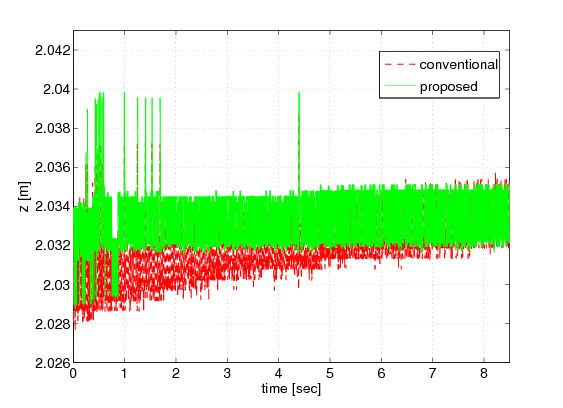
高速ビジョンを用いたアクティブビジョンシステムは視覚フィードバックによるロボット制御において様々な利点を持つ. しかし,高速ビジョンは解像度が高くない場合が多く,立体視による三次元位置の推定精度を高くし難い.
そこで,本研究では,高速ビジョンの高い時間分解能を用いて二値画像上の対象の重心位置が変化する関節角を計測することで, 対象の重心位置に対応するアクティブビジョンの関節角を求め三次元位置の推定精度を向上させる手法を提案した.
参考文献
- 五十嵐 渉,山川 雄司,妹尾 拓,石川 正俊: 高速アクティブビジョンシステムを用いた位置計測精度の向上手法の提案,第12回 計測自動制御学会システムインテグレーション部門講演会,(京都,2011.12.25)/講演会論文集, pp. 2461-2463 (2011)