


Home >
Sensor Fusion >
Spatial Resolution Improvement Method using High Speed Active Vision System
Spatial Resolution Improvement Method using High Speed Active Vision System
Summary
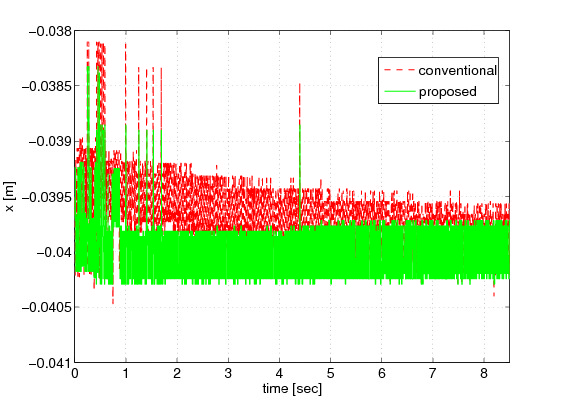
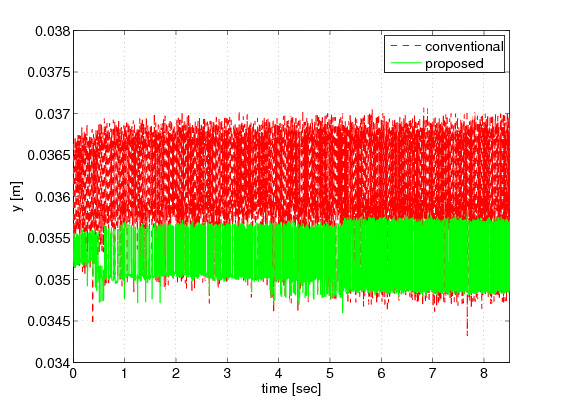
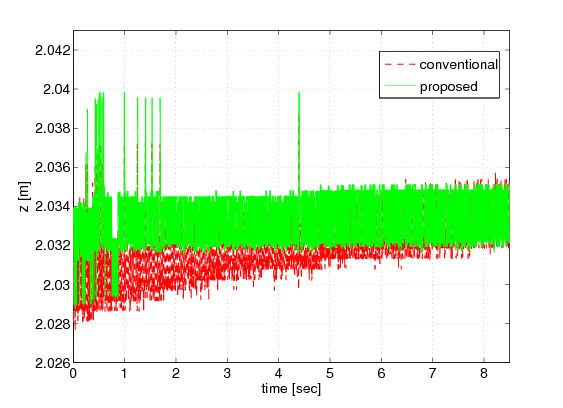
Active vision using high-speed vision has many advantages in controlling robots by visual feedback. However, high-speed vision has often low spatial resolution and this limits the accuracy of three-dimensional position estimation by stereo vision.
This research proposes a method improving the accuracy of three-dimensional position estimation of a static object by two high-speed active vision systems.
Reference
- W.Ikarashi,Y.Yamakawa,T.Senoo and M.Ishikawa: A Proposal of Spatial Resolution Improvement Method using High Speed Active Vision System,12th SICE System Integration Division Annual Conference(SI2011).(Kyoto,Japan,2011.12.25)/Proceedings, pp. 2461-2463