


ホーム >
センサ フュージョン >
階層並列センサ情報処理システム(1ms 感覚運動統合システム)
階層並列センサ情報処理システム(1ms 感覚運動統合システム)
概要
従来のロボットシステムでは,センサの計測速度やコントローラの計算速度が遅すぎるために, 視覚や触覚などの外界センサをフィードバックループに含めることは不可能であった. しかし,これでは外界の情報をリアルタイムに知ることができないため, ロボットの行動に速応性を持たせるのが困難となる.
この問題を解決するために, 我々は 1 ms 感覚運動統合システムを構築した.これは, 「高速なセンサフィードバック」と「複数のセンサ情報を用いたセンサフュージョン」, 「階層的並列情報処理構造」の3つの特徴を実現するものであり, 全てのセンサフィードバックをサイクルタイム 1ms 以内で実現する能力を持っている.
システムの設計方針
複数のセンサからの高速なフィードバックを可能にするために, システムに要求される性質としては次のものが挙げられる.
- センサ入力・処理の高速性
- コントローラの高速性
- 並列性・階層性 を持ったシステム構造
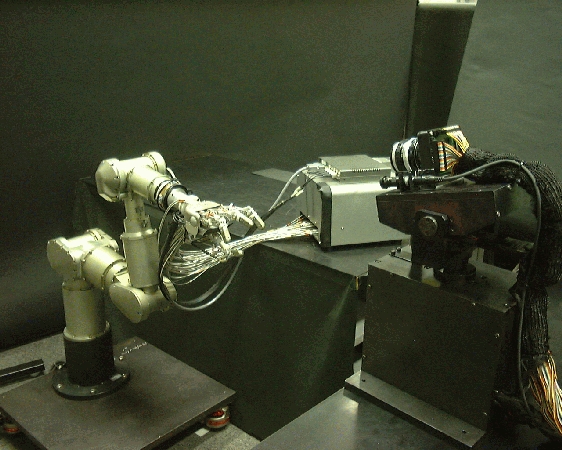
我々はこれらの要求を満たすようなシステムを実現するために,1.に関しては, 独自の高速視覚センサ SPE-256を装備することで,2.3に関しては, DSP (TMS320C40)を用いた階層並列計算処理システムを構築し,ハンド, アームやアクティブビジョン等の多自由度アクチュエータと, 視覚と力覚を接続することで実現した.
写真
{kind=link}
{kind=link}
関連研究
参考文献
- 並木明夫,石井抱,石川正俊:高速センサフィードバックに基づく把握行動, 日本ロボット学会誌,Vol.20, No.7, pp.47-56 (2002)
- Akio Namiki, Yoshihiro Nakabo, Idaku Ishii, Masatoshi Ishikawa : 1ms Sensory-Motor Fusion System, IEEE Transactions On Mechatronics, Vol.5, No.3, pp.244-252 (2000)
- Akio Namiki, Yoshihiro Nakabo, Idaku Ishii and Masatoshi Ishikawa : High Speed Grasping Using Visual and Force Feedback, Proc. IEEE Int.Conf.on Robotics and Automation (Detroit, 1999.5.14)/Proceedings, pp.3195-3200