


1ms Sensory-Motor Fusion System
Summary
In most conventional systems, external sensors such as vision or tactile sensors, are not included in the feedback loop. This is because sensors and controller are too slow. Then system cannot obtain external information in real time and its ability is very much limited.
To solve this problem, our laboratory is constructing "1ms Sensory-Motor Fusion System." In this system, "High Speed Sensor Feedback" and "Multi-Sensor and Motor Fusion" are realized, and all sensor feedback is realized in 1ms.
Configuration
To manage many kinds of sensor information at high speed, the system should have the following features:
- Sensor I/O can be processed at high speed.
- A controller can compute at high speed.
- A system has parallel and hierarchical structure.
To satisfy these demands, we adopt the following structure.
This system uses SPE (Sensory Processing Elements) vision system for realizing high speed visual feedback in 1ms.
We use a DSP (TMS320C40) as the processor for the controller, which has the ability to execute high speed calculations, and to communicate with other processors. We construct a high speed controller with a parallel architecture using a network of DSPs.
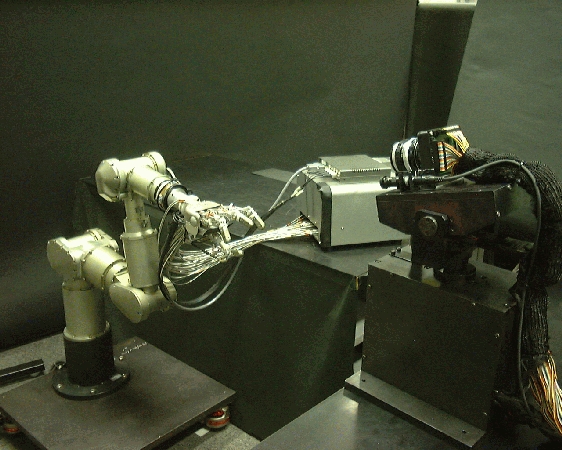
This network is connected with robot systems in parallel, which consists of an active-vision and a seven-axes manipulator and a dexterous hand.
Experiment
Pictures
{kind=link}
{kind=link}
{kind=link}
References
- Akio Namiki, Takashi Komuro, Masatoshi Ishikawa : High Speed Sensory-Motor Fusion Based on Dynamics Matching, Proceedings of the IEEE, Vol.90, No.7, pp.1178-1187 (2002)
- Akio Namiki, Yoshihiro Nakabo, Idaku Ishii, Masatoshi Ishikawa : 1ms Sensory-Motor Fusion System, IEEE Transactions On Mechatronics, Vol.5, No.3, pp.244-252 (2000)
- Masatoshi Ishikawa, Takashi Komuro, Akio Namiki, and Idaku Ishii : 1ms Sensory-Motor Fusion System (Invited), Int. Symp. of Robotics Research (Snowbird, 1999.10.12), pp.291-296 [PDF format]