


ホーム >
システム ビジョン デザイン > ダイナミックアナモルフォーシスシステム
ダイナミックアナモルフォーシスシステム
概要
三次元ディスプレイを用いたインタラクションの実在性を高めるには応答の高速性やオブジェクトのタンジブル性が重要となる. 1,000fpsで投影可能な高速プロジェクタによって平面的な映像呈示やダイナミックプロジェクションマッピングが実現されているが, 任意の三次元オブジェクトをタンジブルに表示することは依然として困難であった.
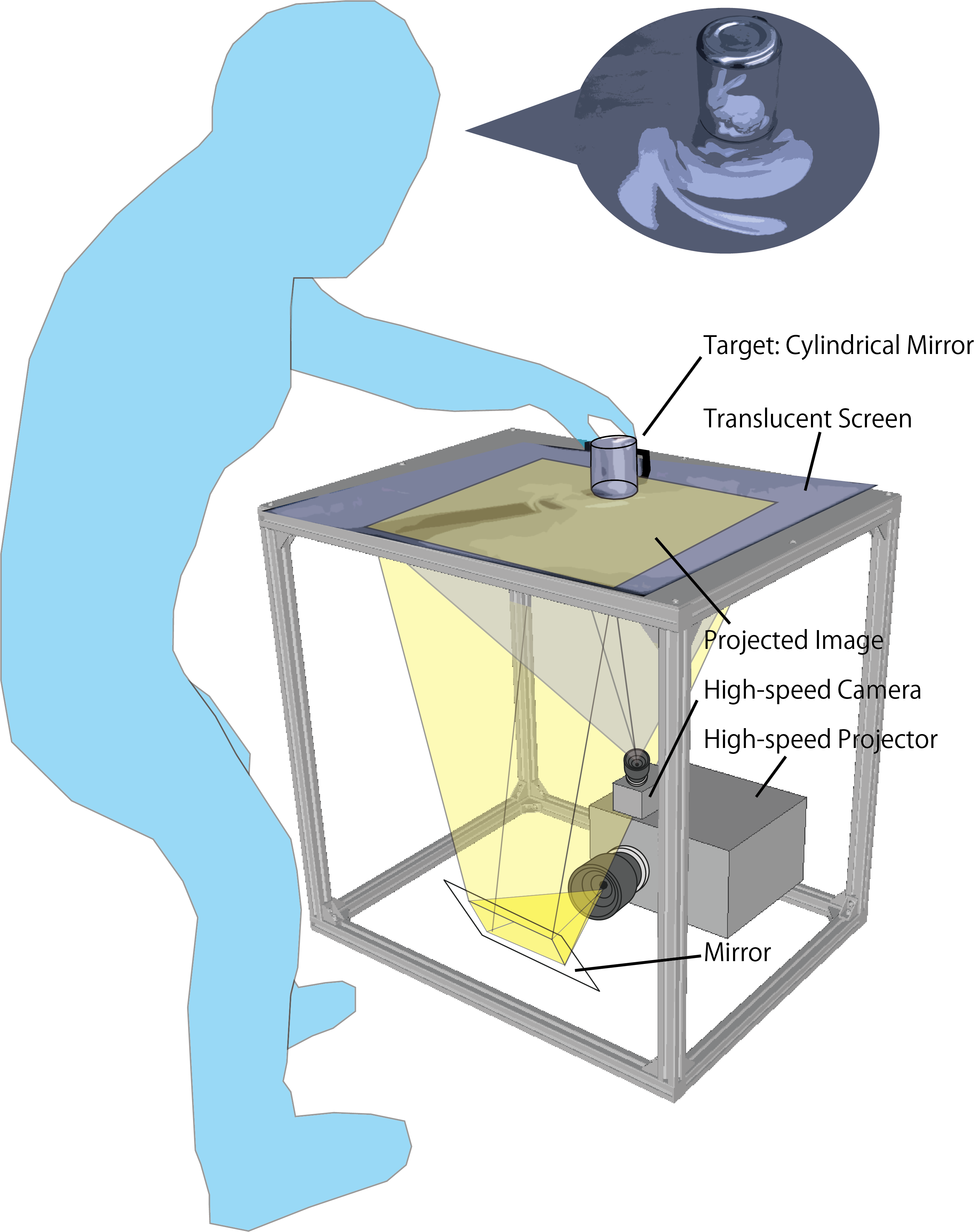
そこで, 本研究では, 平面的な歪像から立体物を知覚させることが可能なアナモルフォーシスの技術に着目し, 高速かつタンジブルな三次元ディスプレイとしてダイナミックアナモルフォーシスシステムを提案している. 最初のプロトタイプとして円筒鏡を用いたアナモルフォーシスを採用し, 高速カメラ・高速プロジェクタを用いたレイテンシ6ms未満, スループット1,000fpsの高速フィードバックシステムを構築することでインタラクティブな三次元ディスプレイを実現した.
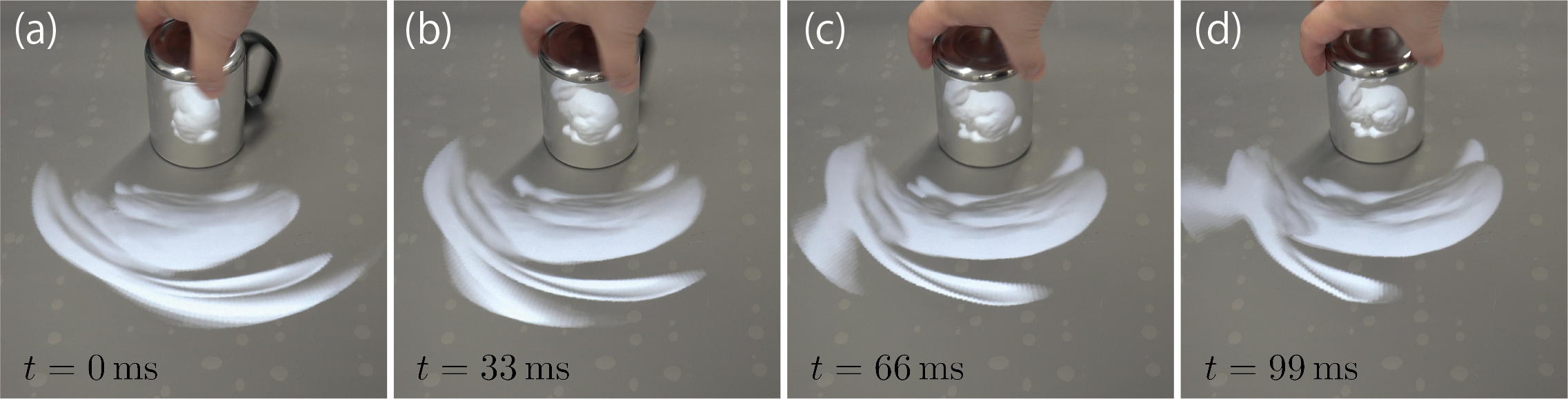
開発したシステムでは,セルフウィンドウ法を用いた高速トラッキングにより円筒鏡の位置姿勢を計測し, その情報を元に事前に設定した視点位置で立体像が知覚されるよう歪像のレンダリングを行っている. このようにしてレンダリングされた平面の歪像を高速プロジェクタから半透過スクリーンに投影することで, 円筒鏡内に三次元オブジェクトが存在するように観測される. ユーザは円筒鏡を任意に移動・回転させることで三次元オブジェクトを操作可能であり, 物理シミュレーションを取り入れることで, 円筒鏡と内部の三次元オブジェクトの衝突など, システムの高速性を活用した様々なインタラクションを実現している.
参考文献
- 田畑智志,末石智大,宮下令央,石川正俊:円筒位置姿勢情報の高速フィードバックを用いたダイナミックアナモルフォーシスシステムの開発, 第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023) (新潟,2023.12.14)/講演会論文集, pp.1280-1285
- Satoshi Tabata, Tomohiro Sueishi, Leo Miyashita and Masatoshi Ishikawa: Dynamic Anamorphosis System Using High-Speed Feedback of Cylinder Pose, SICE Festival 2025 with Annual Conference (SICE FES 2025) (Chiang Mai, 2025.9.11)/Proceedings, pp.679-684