


1 ms対象輪郭トラッキング
概要
非常に高いフレームレートでの画像処理では,内在するアルゴリズムに対し厳しい要件が求められる.この要件を達成する一つの解は,種々の画像処理の問題に特有である並列化を利用することである.しかし,その問題が並列化可能だとしても,すなわち多くの画素に対し同時に同様の計算が可能だとしても,別の側面も考慮しなければならない.特に,メモリアクセスパターンとキャッシュ戦略が性能に大きな影響を与えるため,メモリスループットが制約となるが,これはアルゴリズムを設計する際にこのような問題を考慮する必要があることでもある.また一方で,高フレームレートでの対象観測は,通常のフレームレートの場合と比較して,この問題の異なる側面が利用可能でもある.
画像系列における対象物体の追跡(対象のトラッキングと呼ばれる)は,ロボット・ヒューマンインターフェース・拡張現実感など幅広い分野で応用可能である.さらに1000fpsでのトラッキングの実現は,高速トラッキングのためのデバイスの開発も可能となる.
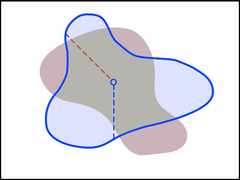
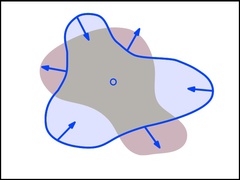
トラッキングの一つの手法として,対象の局所特徴量を見つけて追跡する方法があり,この手法は対象に関する知識を必要としない.その反面,対象の外観が劇的に変化してしまうと見失ってしまったり,対象の中心情報が極めて重要となる高速トラッキングデバイスへのフィードバックを悪化させてしまうこともあり得る.そこで,我々は対象物体の輪郭をトラッキングする手法を採用し,その輪郭内全てが対象物体と扱うことが出来る.対象の外観が変化した場合(動画参照)でも,対象のモデルは更新され,トラッキングは新しい外観に適合するという手法である.
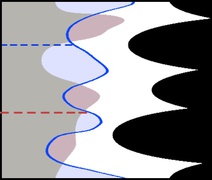
さらに,極座標空間を導入することで,この問題を最近のコンピュータの連続領域メモリに適用可能とする.極座標空間において各行間で部分的に独立となるため,キャッシュコヒーレンスと並列性を両立させつつ,各行に沿って輪郭が内外に動くようにする手法である.本手法は通常のIntel Core i7のプロセッサを用いて,VGAの解像度,1000fpsの動画にも対応可能である.
 |
 |
 |
参考文献
- Niklas Bergström, Masatoshi Ishikawa: 1 ms tracking of target boundaries using contour propagation, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'13), Proceedings pp. 2144-2151
- 奥村光平,奥寛雅,石川正俊: アクティブビジョンの高速化を担う光学的視線制御システム, 日本ロボット学会誌,Vol. 29,No. 2, pp.201-211 (2011)