


ホーム >
ダイナミック ビジョン システム > 3 次元空間内での微生物運動制御
3 次元空間内での微生物運動制御
概要
近年ナノ・マイクロテクノロジーの進歩に伴い,微細な領域で計測・制御を行う機会が増加している. だが顕微鏡下での作業は操作者に大きな負担を強いるため, このような作業を補助するマイクロマシンの実現が求められている.
我々は,微生物が進化の過程で高性能なセンサとアクチュエータをその微小な体内に獲得したことに着目し, 微生物を高機能マイクロマシンとみなして制御することを目指している. 微生物は外部からの電気刺激に対してその運動方向を変化させる「走電性(電気走性)」を持つため, これを運動制御の手段として利用した研究を行ってきた.
だが従来の研究は制御が 2 次元平面内に限定されており, マイクロマシンとしての応用を考えたとき 3 次元空間内への制御へ拡張されることが望ましい. しかし正確に微生物の 3 次元位置を計測するために顕微鏡の倍率を上げてしまうと, 顕微鏡で観察可能な領域,すなわちマイクロマシンとしての作業領域は狭くなってしまうというトレードオフが問題となっていた.
そこで高速な視覚システムを用いた微生物の3次元トラッキング によってこのトレードオフを根本的に解消した. 常に視野中心・焦点面内に微生物を捉え続けることで広い作業領域を実現した. これに走電性による制御を組み合わせることにより 3 次元空間内で微生物の運動を制御することを可能にした.
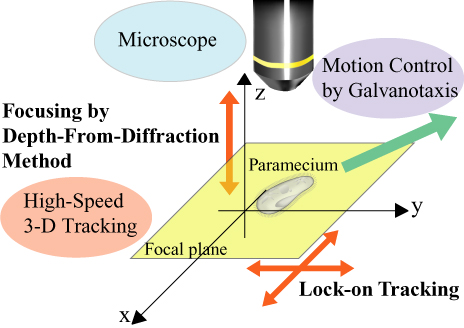
Fig.1. 3 次元空間内での微生物運動制御のコンセプト.
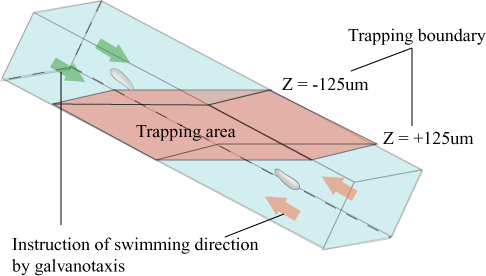
Fig.2. トラッピング制御実験.Trapping Area内に閉じ込める運動制御を行った.
動画
顕微鏡に取り付けられた CCD カメラからの映像,及び記録データから再構成した微生物の 3 次元運動軌跡.
Trapping Area内に閉じ込めるように電場がかかり,制御が行えていることが分かる.
参考文献
- 長谷川健史, 尾川順子, 奥寛雅, 石川正俊:高速ビジョンによるトラッキングを用いた3次元空間内での微生物運動制御, 第25回日本ロボット学会学術講演会 (千葉,2007.9.14)/予稿集,2D12 (2007.9) [PDF(553KB)]
- 長谷川健史,尾川順子,奥寛雅,石川正俊:高速ビジョンによる3次元トラッキングを用いた電場形成下での微生物運動計測, 日本機械学会ロボティクス・メカトロニクス講演会2007(ROBOMEC2007) (秋田,2007.5.12)/講演論文集, 2A2-O06 [PDF(656K)] [Video(2.9M)]