


ホーム >
センサ フュージョン >
高速視覚・近接覚センサを用いたマシュマロの非変形キャッチ
高速視覚・近接覚センサを用いたマシュマロの非変形キャッチ
概要
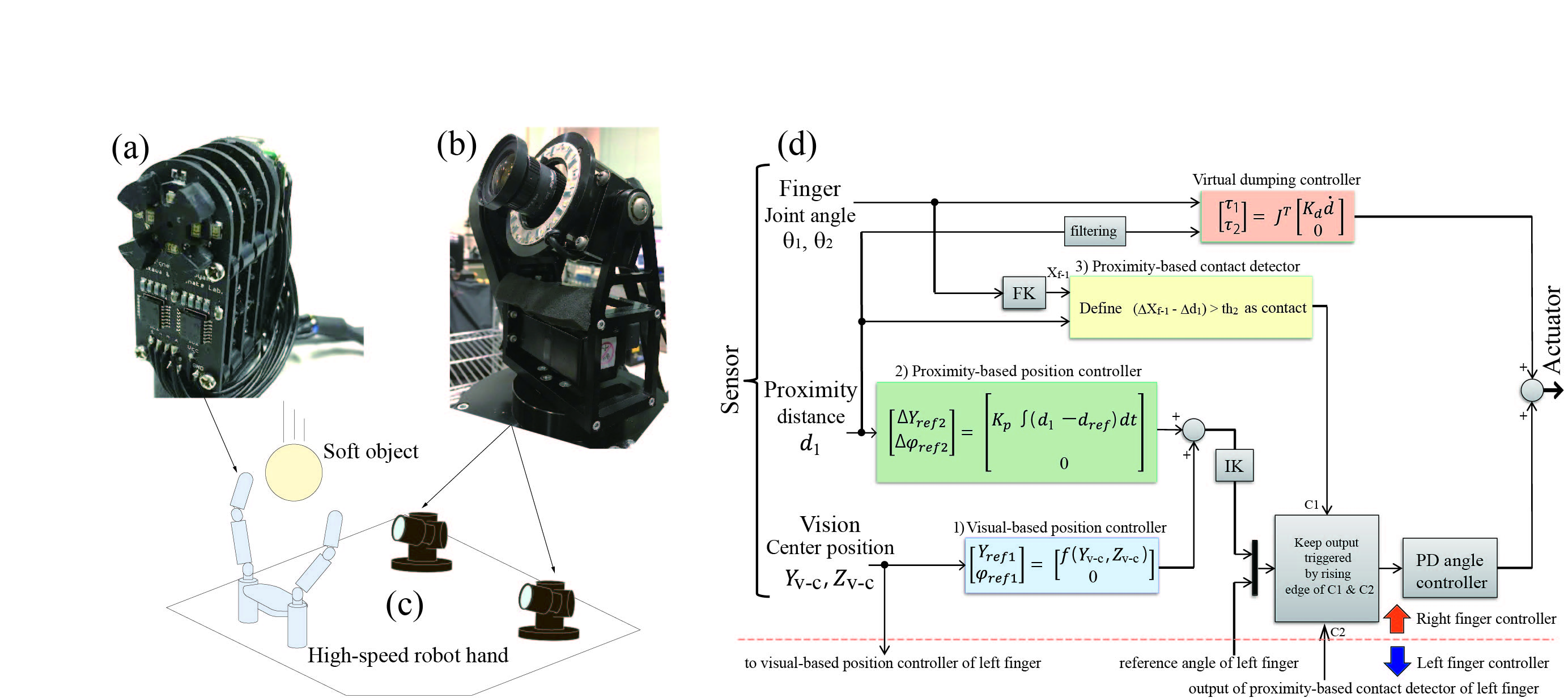
高速ビジョンセンサと高速・高精度近接覚センサを備えた1msセンサフュージョンシステムを開発しました. 1msで物体の中心位置と距離を検出することで,単純な制御によりロボットの指先位置を高速・正確に制御可能となり, 従来の剛体キャッチに加えて柔軟物キャッチが可能になりました.高速・高精度近接覚センサの距離値に基づいて 接触判定を行うため,接触力に依存しない把持が可能であり,柔軟物(マシュマロ)を潰す前に指先を停止させることができます.
本成果は,柔らかさ特性が未知な物体を高速・非変形での把持が可能になることから, 食品を扱う製造ラインへの応用が考えられます.特に現在,人間の作業者に頼りがちな「箱の組立」, 「ケーキ類の把持」,「箱のパッケージング」などの複数作業を含む工程への応用が期待できます.
|
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 小山 佳祐,村上 健一,妹尾 拓,下条 誠,石川 正俊:触覚機能を内包する高速・高精度近接覚センサ-第2報:センサモジュールの開発と接触判定の実現-, 第36回日本ロボット学会学術講演会(RSJ2018)(愛知,2018.9.5) / 講演会論文集,1G3-04