


ホーム >
センサ フュージョン > ビジュアルコンプライアンスを用いた高速ペグ·アンド·ホールアラインメント
ビジュアルコンプライアンスを用いた高速ペグ·アンド·ホールアラインメント
概要
この研究は,高速不確定な位置および姿勢のペグ·アンド·ホールアラインメントの実現を目的としている。 小さい慣性且つ高速的な3自由度能動ペグを使って、2つの高速カメラによるビジュアルコンプライアンスを用いた手法によって、高速、安定的な収束が実現されている。
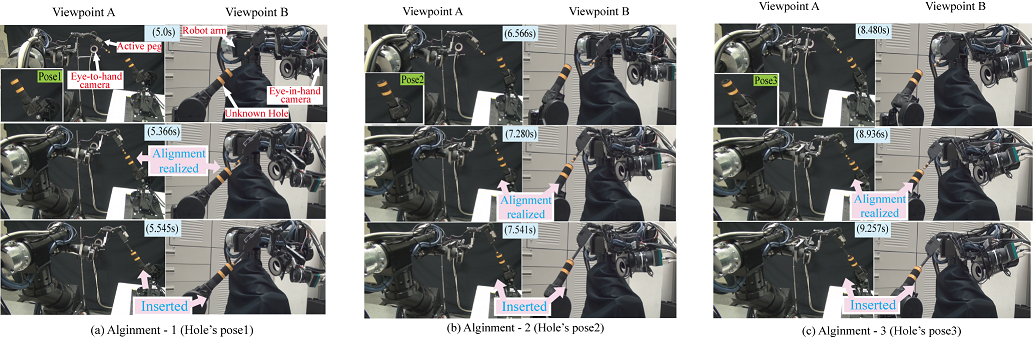
Alignment process
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Shouren Huang, Kenichi Murakami, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa:Fast Peg-and-Hole Alignment Using Visual Compliance,2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'13)(Tokyo,2013.11.04) /Proceedings, pp.286-292