


ホーム >
センサ フュージョン >高速モーションによるロボットの紐通し
高速モーションによるロボットの紐通し
概要
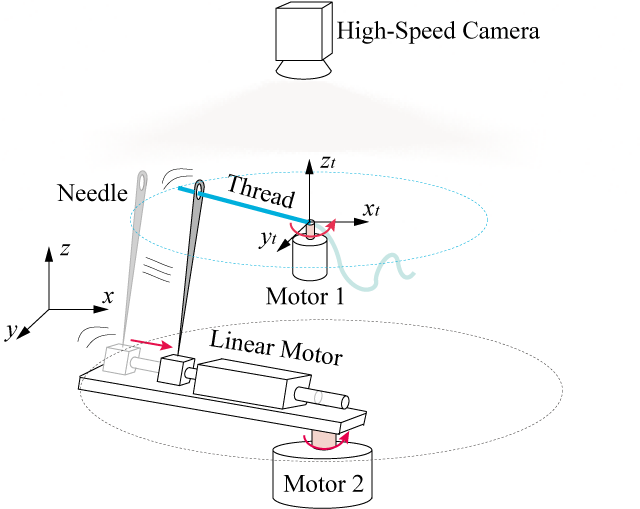
ロボットによる紐のような柔軟な物の操りは非常に困難である。それはロボットの短所でも言える技能(器用な操作スキルや変形による動的な不確定性に対するロバスト性)が求められているのである。 複雑なモデリングに依存する従来法とは異なり、我々は高速モーションと高速視覚センシングに基づいて、出来るだけ簡単なモデルによる動的な操りという逆転の発想に注目してきた。 本研究は、変形による不確定性の問題を解決すると同時に高速にタスクを完了するという目標のもと、ロボットによる紐通しタスクとして提案手法を実証した。 紐通しの実現には、非常に単純な物理現象を利用していた。すなわち、十分な速度で紐を回転させることによって、回転中の紐が常に加えられている遠心力により直線に引っ張られ、剛体として近似することができる。したがって、従来困難であった紐通しという問題を単純なペグ・イン・ホール問題に変換され、ロボットと変形するはずの紐の間の複雑な相互作用が大幅に簡略化され、タスク実行の安定性と高速性を実現する。
提案手法
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Shouren Huang, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: Robotic Needle Threading Manipulation based on High-Speed Motion Strategy using High-Speed Visual Feedback, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015) (Hamburg, 2015.9.30)/Proceedings, pp.4041-4046