2D/3D視線制御に基づく肢体不自由者向けの生活支援ロボットの実現
概要
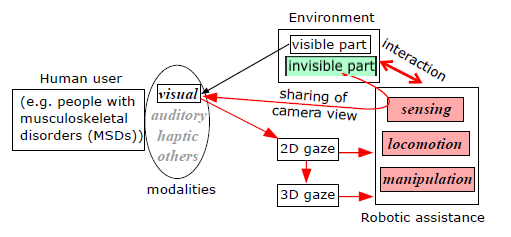
本研究では,図.1
に示すように,視覚障害がない肢体不自由者の日常生活によくある感知、移動、操作など具体的なニーズを満たすためのロボット支援の実現を目的としている.特に,車いす利用による自律移動やロボットアームによる操作支援などロボット支援に加え,肢体不自由者だけでは実現困難になる周囲環境に対する感知支援(例,車いすに座っているユーザーが冷蔵庫上部の中にある食品(目視不可能)を探したい)を実現している.
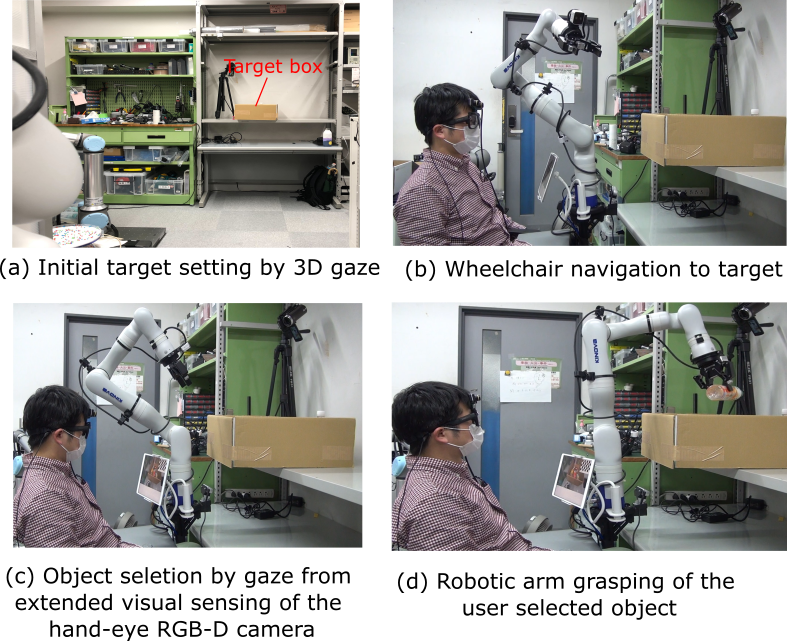
提案手法の有用性を検証するために,以下の応用シナリオで実験検証を行った.車いすに座っているユーザーが視線制御のみでロボットシステムを利用して約5メール離れている棚(高さ:約1.15
メール)の上に置いてある段ボールの中から目標ペットボトルを取り出す.車いすに座っているユーザーの視点からは段ボールの中に入っているものを見ることができないため,視線制御を利用して車いすによる移動支援、ロボットアームの手先にあるカメラによる感知支援およびロボットアームによる操作支援を一連の流れで実現する.
Fig.1 Proposed concept
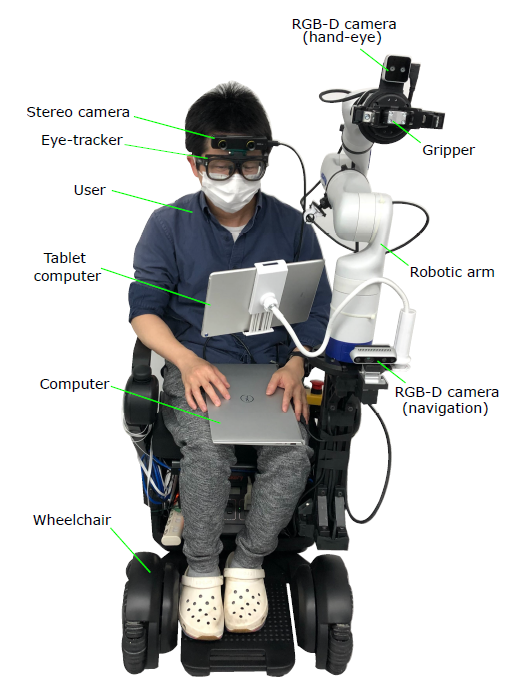
Fig.2 Developed system
Fig.3 Snapshots of experimental process
参考文献
- Y. Cao, S. Huang, S. L. Sørensen, Y. Yamakawa and M. Ishikawa: A Wearable Real-Time 2D/3D Eye-Gaze Interface to Realize Robot Assistance for Quadriplegics. IEEE Access, vol. 13, pp. 155259-155276, 2025, doi: 10.1109/ACCESS.2025.3603617
- Chunxin Yang, Shouren Huang, Yuji Yamakawa, Masatoshi Ishikawa: Design of a Robotic Assistance System for Individuals with Disabilities Based on a Wearable 2D/3D Gaze Control Interface. Proceedings of the 2025 IEEE International Conference on Cyborg and Bionic Systems (CBS), pp.662-668, 2025.
- Shouren Huang, Sune Lundø Sørensen, Yongpeng Cao, Masatoshi Ishikawa, Kjærgaard Mikkel, Yuji Yamakawa:
Robotic Assistance for Extended Sensing, Locomotion and Manipulation by Gaze Control,2023 32nd IEEE
International Conference on Robot and Human Interactive Communication (RO-MAN)
- 黄 守仁,Sørensen Sune Lundø, Cao Yongpeng, Mikkel Kjærgaard, 石川 正俊, 山川 雄司:
2D/3D視線制御に基づく肢体不自由者向けの生活支援ロボットの実現,第24回計測自動制御学会システムインテグレーション部門講演会(SI2023)(新潟,2023.12.14)/講演会論文集,pp.130-132