


ホーム >
システム ビジョン デザイン > ビジョンチップのための複雑背景下での二値画像トラッキングアルゴリズム
ビジョンチップのための複雑背景下での二値画像トラッキングアルゴリズム
概要
通常,物体のトラッキングには色や形状,パターンなどの情報が利用されるが, ビジョンチップでは高レートで情報が得られる一方で,利用できる情報はかなり限定されている. 一方,従来ビジョンチップで用いられてきた,領域の時空間的連続性のみを用いたアルゴリズムでは, 背景や他物体との接触に弱いなどの欠点があった.
そこで今回,ビジョンチップで扱いやすい二値化された画像を用いつつ, 背景などの外乱にも強いトラッキングのアルゴリズムを提案した.提案アルゴリズムでは, 対象の運動モデルを仮定し,カルマンフィルタを用いて量子化誤差などの観測ノイズ成分を除去するとともに, 背景との衝突を検出すると,カルマンフィルタのパラメータのうち, 観測ノイズの分散を大きく取ることにより,運動モデルからの予測を重視した推定値を得る.
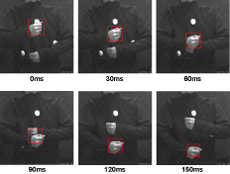
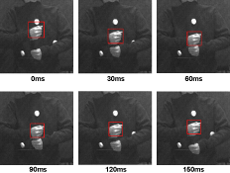
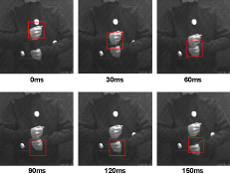
Fig. 1 は提案アルゴリズムを高速カメラで撮像した画像に対して適用した例である. 上は1/1000秒枚に本アルゴリズムを適用した例であり,手の交差・衝突に対して正しく認識している. 下は1/30秒毎にアルゴリズムを適用した例であり,手の衝突が交差と誤って認識されていることがわかる. この結果から,高フレームレートの情報を利用することで, 速度・加速度などの運動パラメータが高精度で推定され, 背景と接触して一部の情報が欠落しても正しく補完することができることが示された.
|
|
1000fps |
| 通り抜け | 衝突 |
|
33fps |
| Fig.1 手のトラッキング |
参考文献
- 葭本香太郎,小室孝,鏡慎吾,石川正俊:ビジョンチップによる背景存在下での高速トラッキング, 日本機械学会ロボティクス・メカトロニクス講演会/講演論文集,2P1-N-096(2005)
- 葭本香太郎,小室孝,鏡慎吾,石川正俊:ビジョンチップを用いた複雑背景下での二値画像トラッキング, 第5回計測自動制御学会システムインテグレーション部門講演会(SI2004)/論文集,pp.200-201 (2004)