


ホーム >
システム ビジョン デザイン > モーメントを用いた三次元物体のトラッキング
モーメントを用いた三次元物体のトラッキング
概要
ロボットハンドがすばやく動くものをつかんだり、道具を器用に操ったりするためには、 対象物体の位置姿勢を高いフレームレートで取得する必要がある。 本研究では画像の統計特徴量であるモーメントを用いて、 高速かつノイズに対してロバストな位置姿勢認識を実現する手法を提案し、 計算機シミュレーションで評価実験を行った。
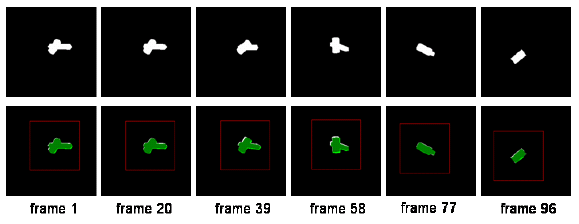
Fig. 1 ハンマー形状物体のトラッキング
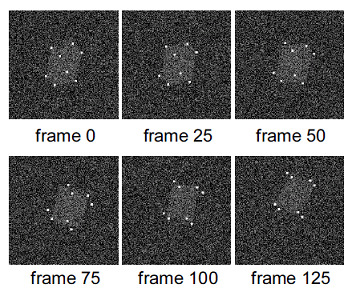
Fig. 2 直方体のトラッキング(ノイズを付加した場合)
参考文献
- Takashi Komuro, Masatoshi Ishikawa:A Moment-based 3D Object Tracking Algorithm for High-speed Vision, 2007 IEEE International Conference on Robotics and Automation(ICRA'07) (Roma, 2007.4.11)/Proceedings, pp.58-63 [PDF]
- 西亀健太, 小室孝, 石川正俊:モーメントテーブルを用いた3次元物体のトラッキング, 第10回画像の認識・理解シンポジウム(広島,2007.7.31/論文集, pp.1099-1104(IS-3-30)