


ホーム >
システム ビジョン デザイン > 小型機器操作に向けた多指位置姿勢の高速推定
小型機器操作に向けた多指位置姿勢の高速推定
概要
本研究では,小型機器における操作性を改善するため,機器の前面にかざした手指を用いて多様な操作を行う入力システムを達成することを目的に,高速に運動する手指の位置・屈曲姿勢を推定する手法を提案する.
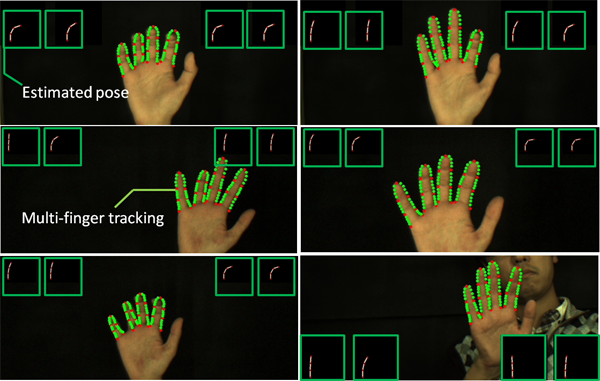
本手法では,一般的なカメラより高いフレームレートを用いることで手指運動のフレーム間差分が少ない状況下を想定し,起こり得る手指の画像を学習した指変形モデルを利用したトラッキングを行う.そしてこの結果より,手指領域の位置を推定する.ここで用いる指変形モデルは,予め想定した手指運動の自由度に対して,手の構造と運動から制約される見え方を統計的に学習することで作成する.これにより,屈曲動作などの見えが大きく変わる指のトラッキングと,時系列情報と組み合わせた短い処理時間を達成できる.さらに,屈曲運動の変化と画像の変化の相関を表現できることを利用し,モデルパラメータからの姿勢推定が可能となる.

動画
関連研究
参考文献
- Yoshihiro Watanabe, Atsushi Matsutani, Takehiro Niikura, Takashi Komuro, and Masatoshi Ishikawa: High-Speed Estimation of Multi-finger Position and Pose for Input Interface of the Mobile Devices, IEEE Global Conference on Consumer Electronics (GCCE 2012) (Chiba, 2012.10.03) / Proceedings, pp. 233-237.
- 松谷淳史, 新倉雄大, 小室孝, 渡辺義浩, 石川正俊: 小型機器操作に向けた多指位置姿勢の高速推定, 第18回画像センシングシンポジウム (SSII2012) (横浜, 2012.6.08)/講演論文集,IS3-10.
- 松谷 淳史, 新倉 雄大, 渡辺 義浩, 小室 孝, 石川 正俊: 高速ジェスチャインタラクションのための動的変形モデルを用いた指先トラッキング, 第12回計測自動制御学会システムインテグレーション部門講演会 (京都, 2011.12.25)/講演会論文集, pp.2436-2439.