


3視点拘束に基づくセグメントパターン投影型高速3次元計測
概要
ビデオレート(30Hz)を大幅に上回る速さで撮像から画像処理までを行うことができる高速ビジョンシステムは, ロボティクスやヒューマンインターフェースなどの様々な応用において重要な技術となっている. たとえば, システムや対象が高速に運動する自動車やロボットなどにおいて, ビデオレートの処理では取得データのフィードバックが間に合わないだけでなく, 計測自体が困難である場合も多いため, 高速リアルタイムに取得可能な高速ビジョンシステムは重要である. また, 工場における検査においても, 計測のために静止させることは時間効率を下げる原因であるが, 高速ビジョンシステムを使うことで運動したまま計測することが可能となる. また, 近年はスポーツサイエンスの分野においても高速ビジョンシステムが注目されてきている.
しかし, 従来の高速ビジョンシステムは主に2次元的なパターン認識にとどまっている. 数百fpsの速度でリアルタイム3次元計測を実現できれば, 高速ビジョンシステム応用の可能性がさらに広がると考えられる. これまでにも, 200fpsを超える高速なリアルタイム3次元計測は様々なアプローチで実現されているが, 対象に対する運動や距離の制限, 解像度の低さなどの問題を抱えていた.
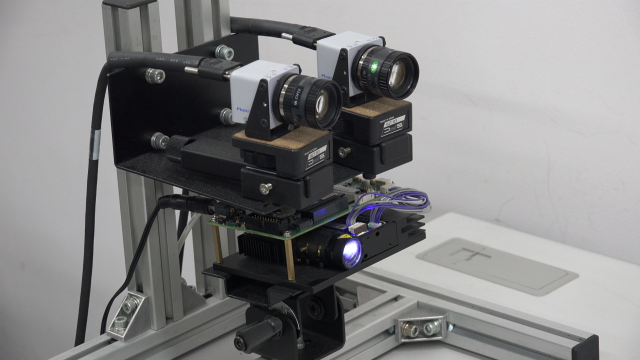
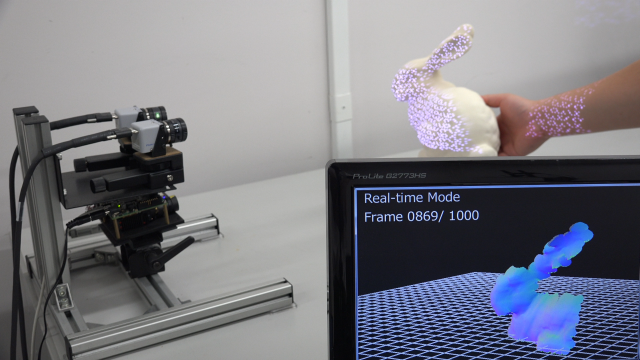
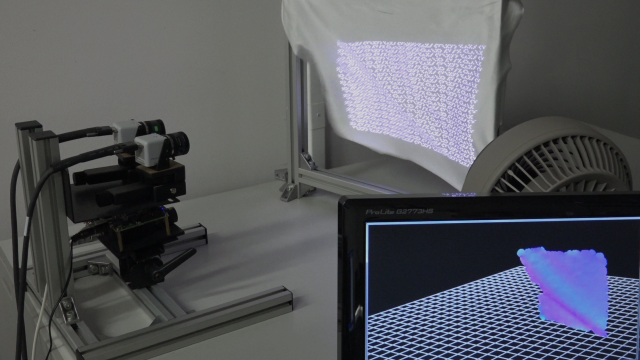
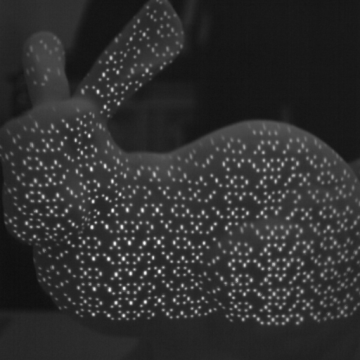
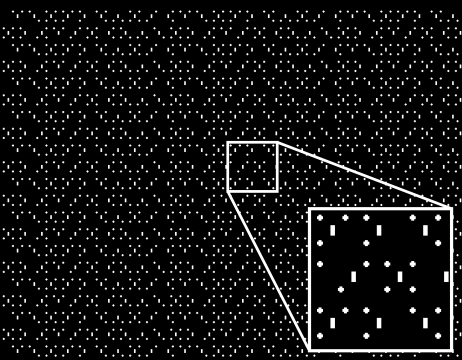
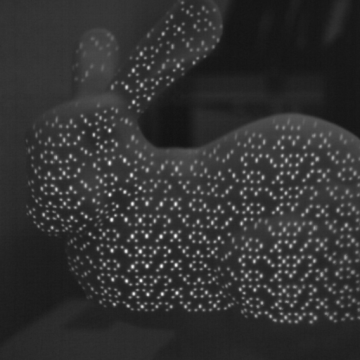
そこで, 本研究では, 3視点幾何によるエピポーラ拘束と階層処理を組み込むことで, これらの問題を解決し, ロバストかつ高速に3次元点群を取得できることを示す. また, このような処理を実現する独自のパターンとしてセグメントパターンを提案する. さらに, 2台のカメラと1台のプロジェクタによって構成される高速3次元計測システムの開発を行った. セグメントパターンは多数の基本要素によって構成され, 各基本要素は中央の線分とその周囲の複数の点によって構成されている. 3視点幾何のエピポーラ拘束によって, 画像間で対応する点を検出するときに必要とされる各基本要素の属性の複雑さが緩和されているため, 高速に検出が可能である単純な構成の基本要素を用いても高精度に検出が可能である. エピポーラ拘束による画像間の対応点の探索範囲の大幅な削減と各画像独立に特定可能な属性による画像間で対応する点の候補の削減, そして, 基本要素の階層構造による段階的な検出処理と高速に検出可能な構成要素の使用によって高速高精度な計測が実現されている. また, フレームごとに独立して計測するため, 対象の運動の急激な変化や不連続な変化に対しても影響を受けずに計測できる. このシステムを用いて1000fpsの速度を実現し, 運動や変形する物体の形状を高速に取得できることを示した.
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- 田畑智志, 野口翔平, 渡辺義浩, 石川正俊 : 3視点拘束に基づくセグメントパターン投影型高速3次元計測, 計測自動制御学会論文集,Vol.52, No.3, pp.141-151(2016)
- Satoshi Tabata, Shohei Noguchi, Yoshihiro Watanabe, and Masatoshi Ishikawa: High-speed 3D Sensing with Three-view Geometry using a Segmented Pattern, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Hamburg, 2015.9.30)/Proceedings, pp.3900-3907 (2015)
- 田畑智志,野口翔平,渡辺義浩,石川正俊 : 3視点拘束に基づくセグメントパターン投影型リアルタイム3次元センシング,第15回 計測自動制御学会 システムインテグレーション部門講演会(SI2014)(東京,2014.12.17)/講演会論文集, pp.2261-2265. 計測自動制御学会 学術奨励賞・技術奨励賞