


ホーム >
アクティブ・パーセプション >
移動速度に応じたモーションブラー補償を用いた路面投影手法
移動速度に応じたモーションブラー補償を用いた路面投影手法
概要
本研究では,小型高速プロジェクタを搭載した移動体が走行しながら路面に情報を投影する際,走行速度に起因するモーションブラーをリアルタイムに補償する手法を提案する.車両や移動ロボットが路面に図形・文字・矢印などのシンボルを投影することで,歩行者や周囲の人員に直感的に意図を伝達する技術が注目されているが,移動中は投影パターンにブラーが生じ,視認性が著しく低下するという問題があった.
提案手法では,小型自動搬送車(AGV)に搭載した小型高速プロジェクタの投影光路中にガルバノミラーを配置し,フォトリフレクタで取得した走行速度情報をもとにミラー角度をリアルタイムに制御することで,移動に伴う投影像のブラーを補償する.
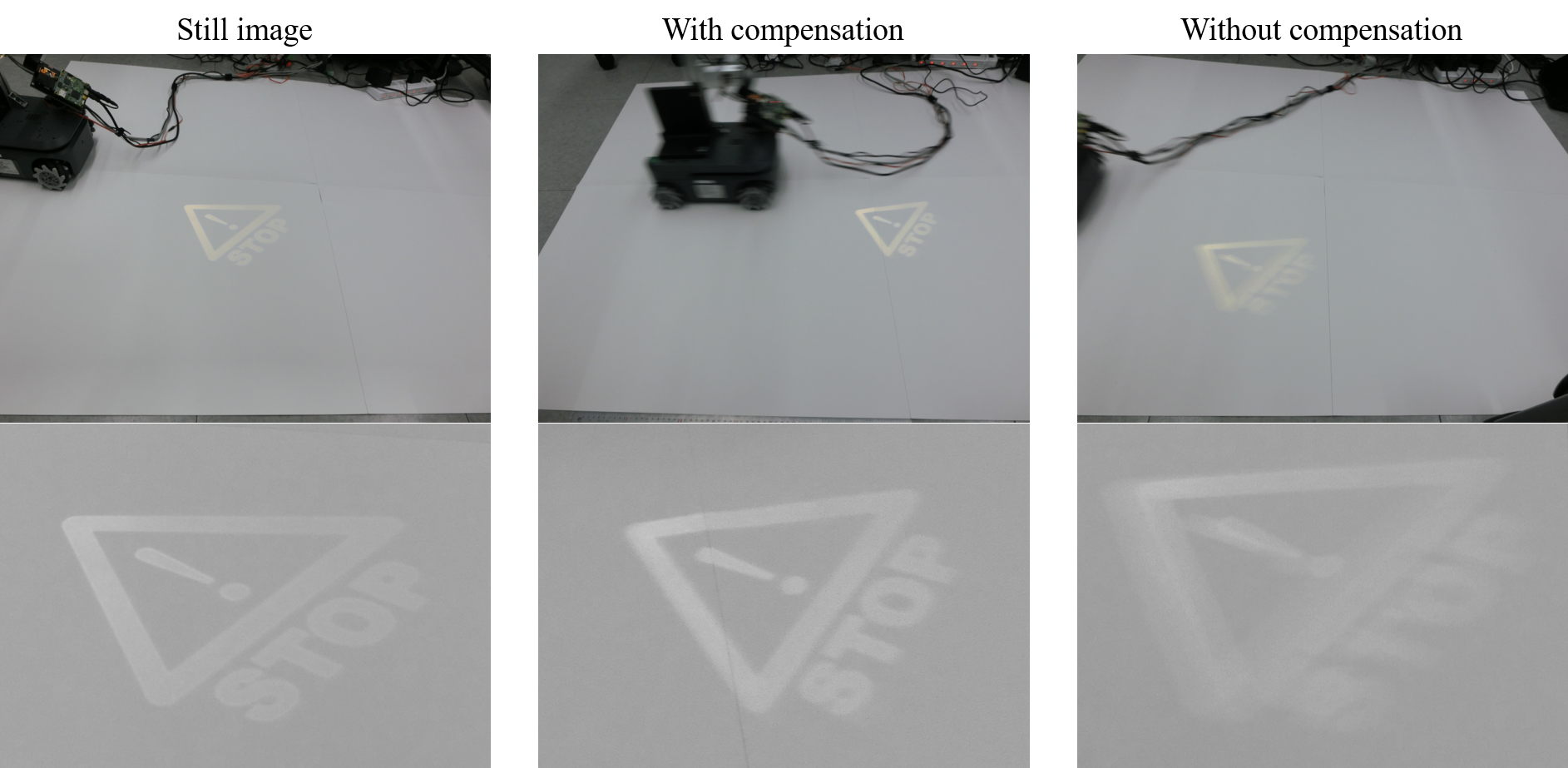
室内実験において,走行速度 1 m/s の条件下で補償の有無を比較した結果,投影像の鮮明さが向上することが確認された.本手法は,工場・倉庫内の移動ロボットによる安全表示や,車両周辺への注意喚起・進路提示表示など,幅広い応用が期待される.
 |
参考文献
- 蛭間 友香,望戸 雄史,早川 智彦,三野 綾子,石川 正俊:移動速度に応じたモーションブラー補償を用いた路面投影手法, 第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)(広島,2025.12.10),講演会論文集, pp.1576-1578