


ホーム >
ダイナミック ビジョン システム> 手指高速トラッキングに向けた楕円群指輪マーカー
手指高速トラッキングに向けた楕円群指輪マーカー
概要
ディスプレイやロボットなどの情報関連装置を扱う際に必要となる入力インターフェースとして用いる代表的な部位は手や指である. キーボードなどの接触式だけでなくジェスチャー認識などの非接触式の操作インターフェースも存在するが, 違和感のない映像や機械とのインタラクションに向けては,マーカーレス方式では計測の遅延時間に大きな課題がある. モーションキャプチャシステムのようなマーカー方式では高速低遅延なトラッキングは可能となるが, 凸状のドットマーカーを手指や体表に装着する必要があり,落脱など装着持続性に課題があると考えられる. 装着持続性の高いマーカーによる手指姿勢の低遅延トラッキングは, 計測の長時間化など手指トラッキングの応用シーンの拡大が期待できる.
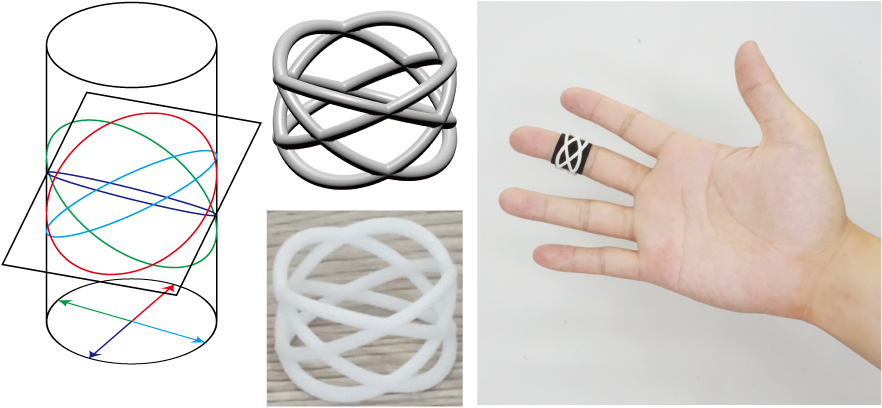
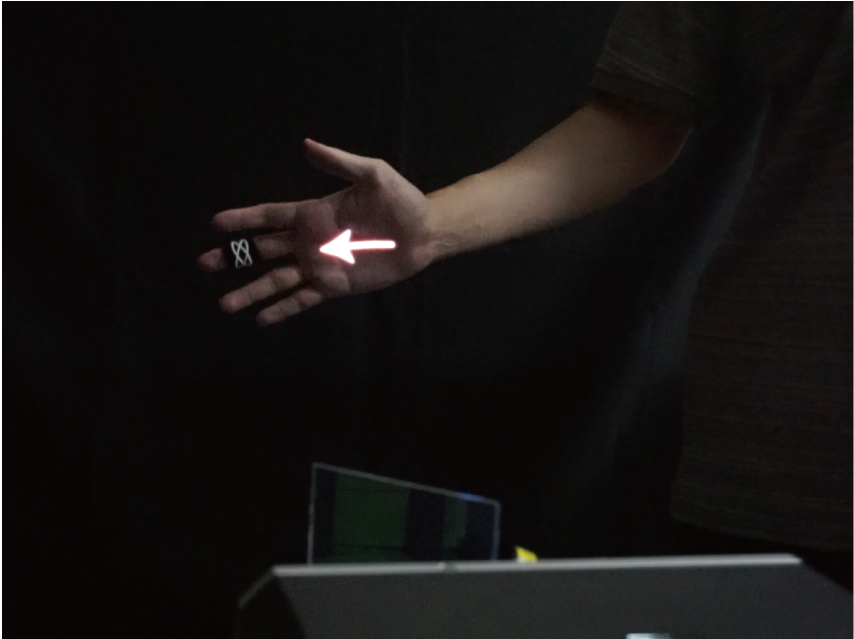
本研究では,装着持続性の高いマーカーとして指輪に着目し, 複数の楕円から構成される楕円群指輪マーカーを提案する(図1). 透視投影変換によって二次元画像として観測するカメラにおいて, 三次元空間における円や楕円は常に楕円に見えるという射影不変性を積極的に活用して姿勢推定を行う. 高速画像処理における二値化や輪郭検出などの特徴抽出と楕円フィッティングの最適化処理も含めて, 全体として2ミリ秒以下での姿勢推定が可能であり, 高速低遅延プロジェクタと連携した 低遅延なフィードバック動作として, 図2に示す手のひらへのダイナミックプロジェクションマッピングも可能となる. このような映像投影に限らず,手指の高速かつ複雑な動作に対する低遅延フィードバックが可能となるため, 人間機械協調,スポーツ,医療など幅広い分野への応用展開へと繋がる.
 |
 |
参考文献
- 末石智大,石川正俊: 手指高速トラッキングに向けた楕円群指輪マーカーの開発, 第22回計測自動制御学会システムインテグレーション部門講演会 (SI2021) (オンライン,2021.12.16)/講演会論文集, pp.1382-1387
- Tomohiro Sueishi and Masatoshi Ishikawa: Ellipses Ring Marker for High-speed Finger Tracking, The 27th ACM Symposium on Virtual Reality Software and Technology (VRST2021) (Osaka, 2021.12.10)/Proceedings, Article No. 31