


EmnDash: M系列破線マーカーによる高速自己姿勢推定
概要
カメラを用いた自己位置・姿勢の推定は拡張現実感やナビゲーションに利用され, ユーザーの姿勢情報に応じた高いユーザー体験を創出できる. 特に自転車競技などのスポーツに着目すると,広域かつ高速に移動する状況下での姿勢情報は, 動作中のフィードバック提示も伴うことで高い運動学習効果が期待できる. しかしながらスポーツを対象とした屋外での自己位置・姿勢推定は, 高速性・広域適用性・明環境対策を全て満たす必要があり, 環境側のテクスチャを利用する方法や地面埋込などによる光学マーカーを利用する方法では対応が困難であった.
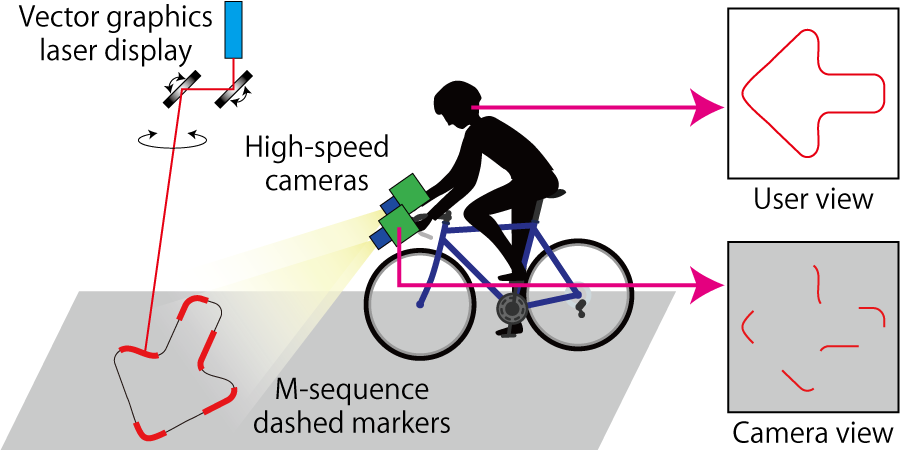
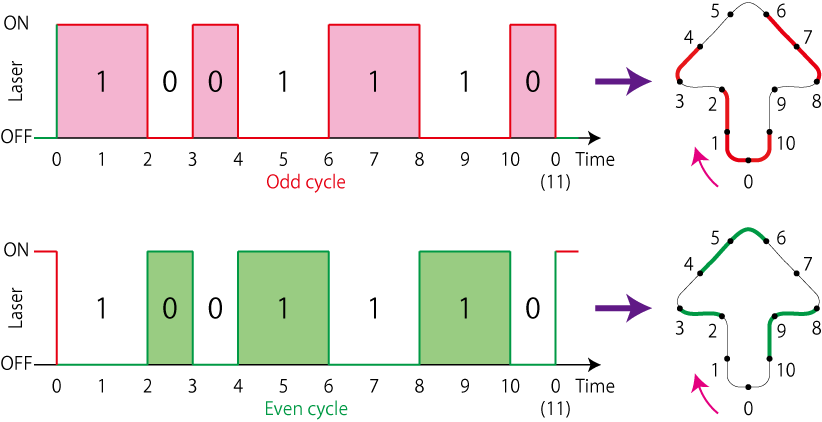
そこで本研究では,広域適用性・明環境対策への手段としてガルバノミラーを用いたベクター型レーザー投影系に着目し, なおかつM系列破線マーカーの埋め込みによる高速なトラッキングを可能とする,EmnDashと名付けたシステムを提案する(図1). EmnDashは周期的に走査されるベクター図形に対し, 破線の長短によって0と1を表現したM系列信号を埋め込んでいる. この破線は奇数周期と偶数周期でオンとオフが入れ替わるため, 露光時間の短い高速カメラにとっては破線に見えるのに対し, 人間の眼など露光時間の長い条件では破線マーカーが不可視となり実線として観測される(図2, 3). この露光時間の違いを利用して,ユーザーには周囲の地面に何らかのベクター型図形を表示しつつ, 高速カメラがM系列破線マーカーを認識して自己姿勢推定を行うことが可能となる. またM系列は部分系列の観測から全体における位置を一意に特定することの可能な特徴をもつため, 1枚の画像だけからカメラの絶対的な姿勢が分かり,遮蔽などに頑健な高速トラッキングも可能となる. 本システムはレーザー投影系と高速カメラで同期をとる必要が無く, レーザーの遠方到達性と高速カメラのウェアラブル性により, 自転車競技・マラソン・スケート競技といったスポーツ分野だけでなく, 自動車などの交通分野での応用展開も将来的に期待される.
 |
|
 |
|
参考文献
- Tomohiro Sueishi, Ryota Nishizono, and Masatoshi Ishikawa: EmnDash: A Robust High-Speed Spatial Tracking System Using a Vector-Graphics Laser Display with M-sequence Dashed Markers, Journal of Robotics and Mechatronics, Vol.34, No.5, pp. 1085-1095 (2022)
- 末石智大,西薗良太,石川正俊: ベクター型レーザー投影系における M 系列破線マーカーを用いたロバスト高速自己姿勢推定, 第21回計測自動制御学会システムインテグレーション部門講演会 (SI2020) (福岡,2020.12.17)/講演会論文集, pp.1445-1448 計測自動制御学会 システムインテグレーション部門SI2020 優秀講演賞
- Ryota Nishizono, Tomohiro Sueishi, and Masatoshi Ishikawa: EmnDash: M-sequence Dashed Markers on Vector-based Laser Projection for Robust High-speed Spatial Tracking, IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct2020) (Recife, 2020.11.12) pp. 195-200