Home >
Sensor Fusion >
Fully Automatic Peg-and-Hole Alignment based on Dynamic Compensation
Fully Automatic Peg-and-Hole Alignment based on Dynamic Compensation
Summary
We propose a fully automatic solution for high-speed peg-and-hole alignment under many uncertainties without involving any teaching task. It is implemented by a coarse-to-fine strategy with better performance comparing with our previous semi-automatic approach. Firstly, the coarse motion of the main robot is planned by one inspection of the randomly placed workpiece from a roughly calibrated static camera. Then, during the task implementation, the add-on module realizes fine compensation of accumulated errors under 1,000 Hz visual feedback. While traditional industrial robots achieve absolute accuracy in the order of a few millimeters under high-speed positioning, the add-on module can improve the performance of such a robot with an order of magnitude, reaching a level of absolute accuracy of about 0.1 mm. Therefore, we can realize fast and accurate alignment for uncertain placement of the workpiece, even under systematic uncertainties of the main robot.
This technology can improve existing industrial robots’ performance while at the same time reduce the workload of robot operators. It may find applications in many industrial tasks, such as in welding, painting as well as assembly.
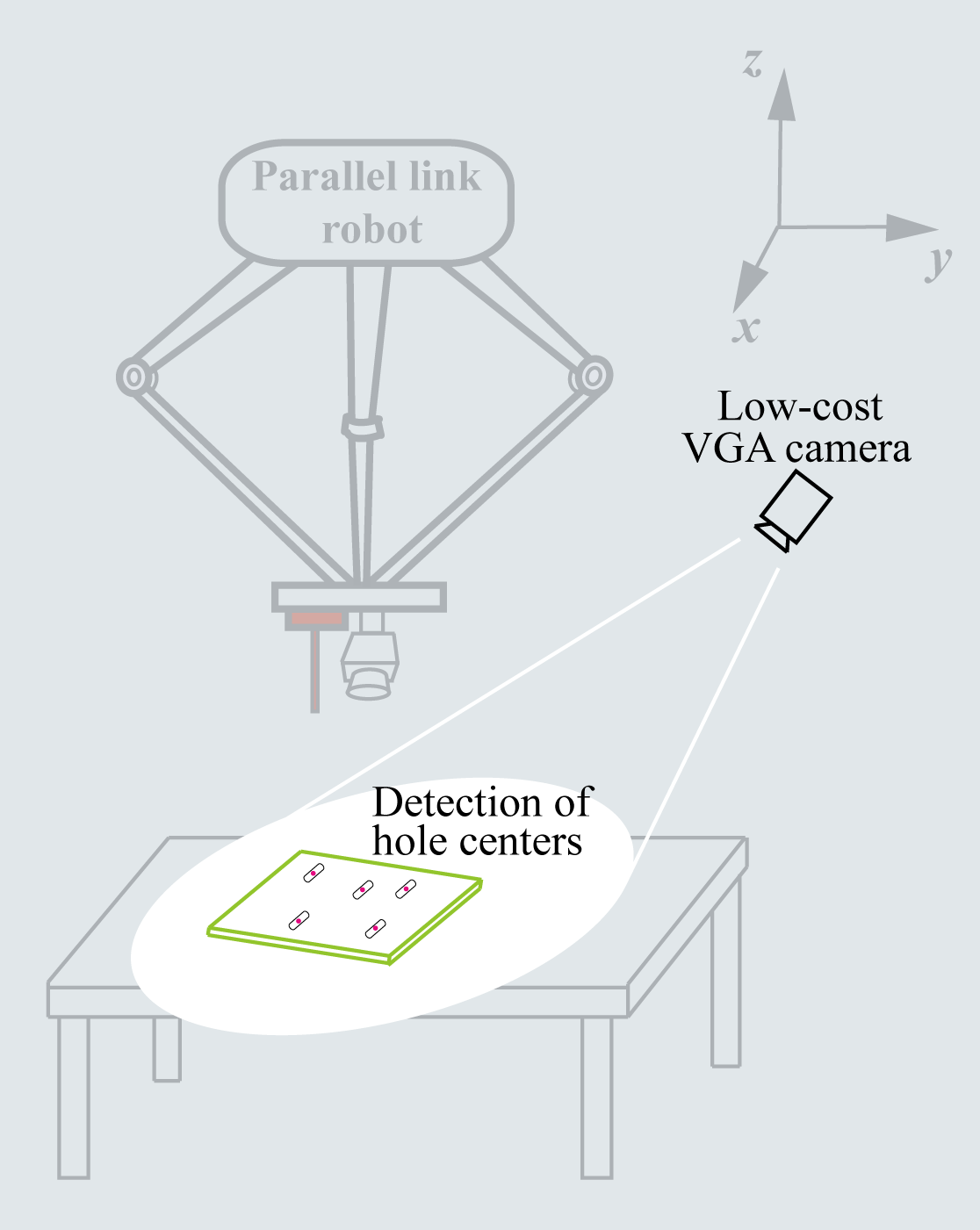
Fig.1. Center of each hole on a randomly
placed workpiece is detected by a low-cost web camera.
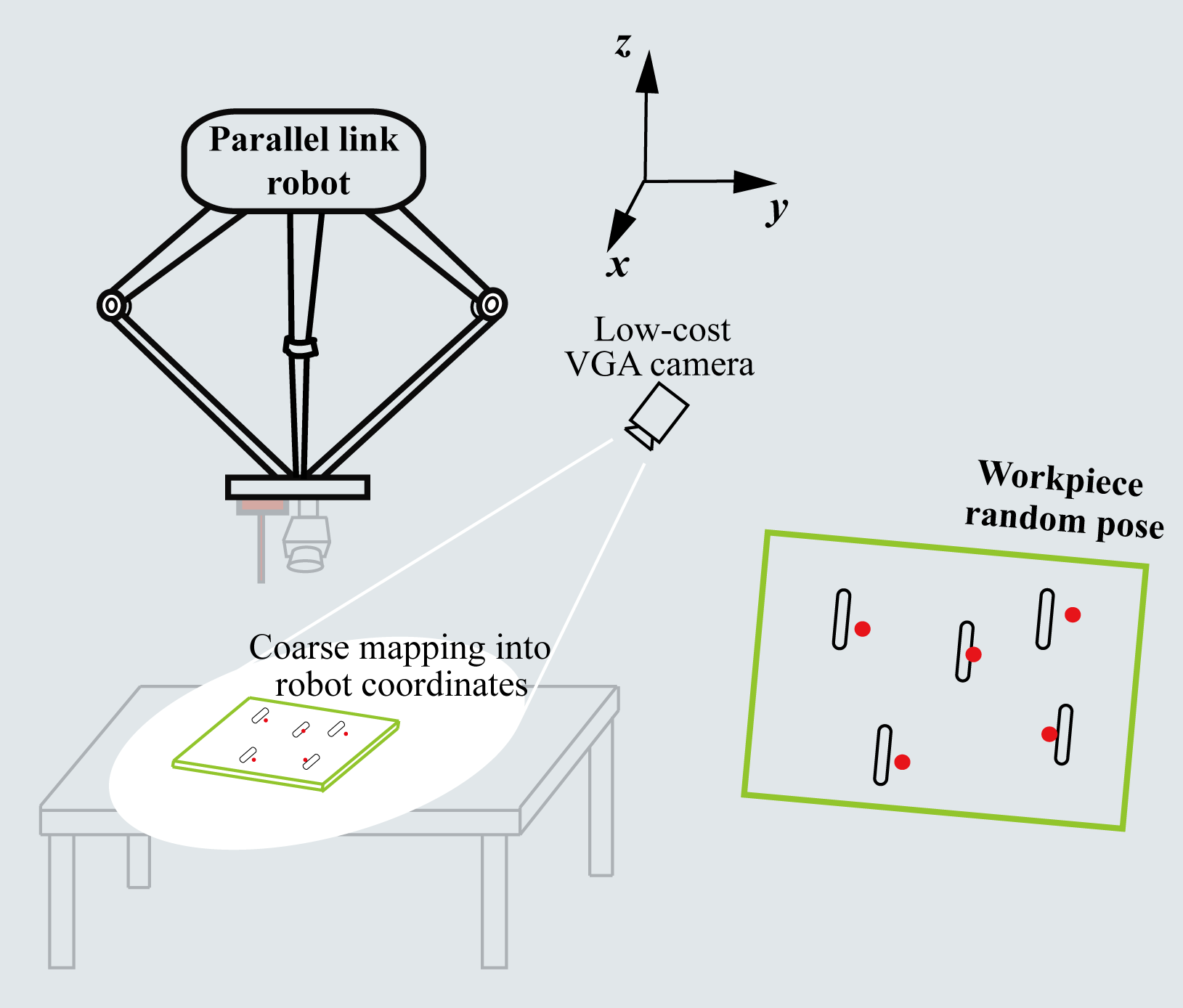
Fig.2. Hole centers in image coordinates are converted into
the coordinates of the parallel robot by coarse mapping.
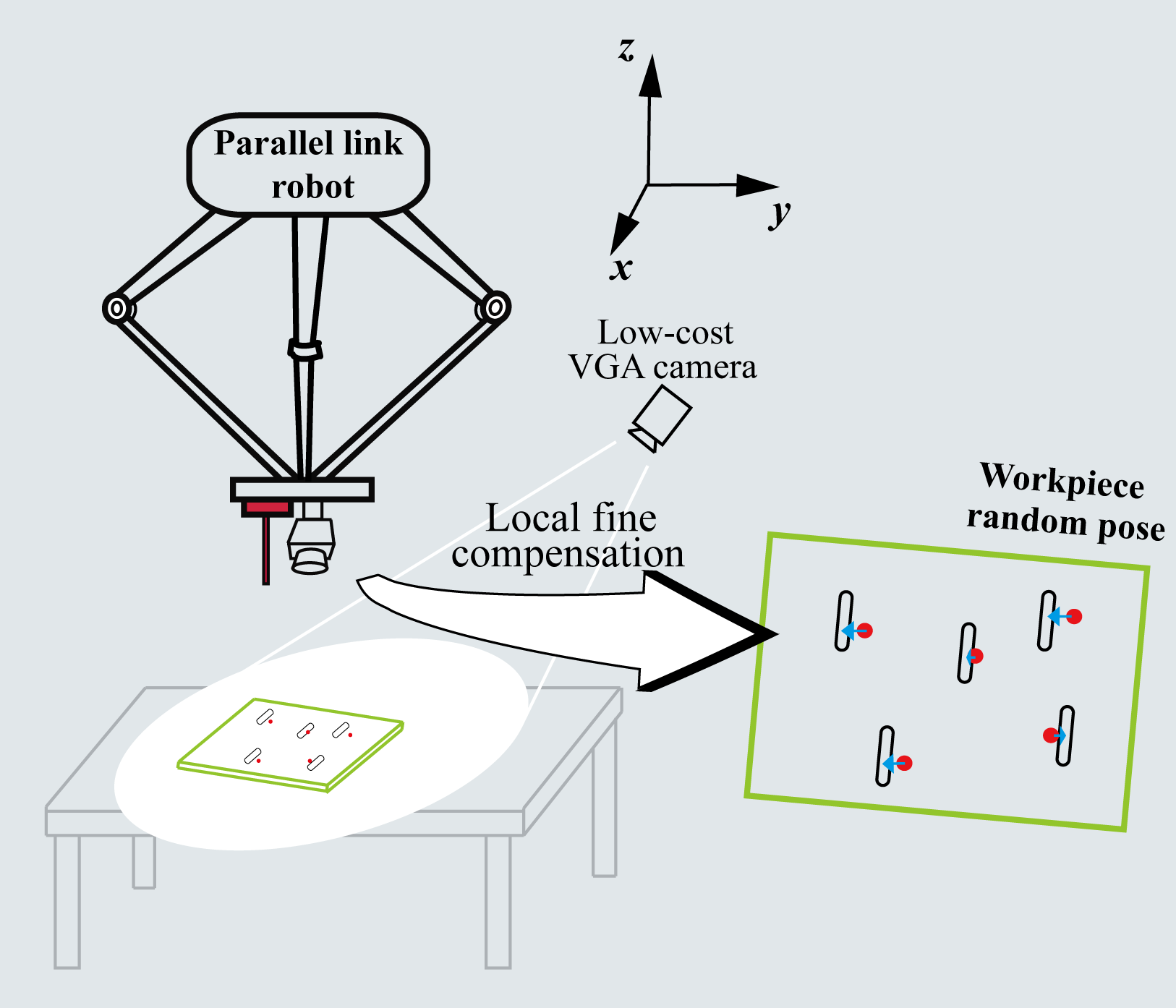
Fig.3. Accumulated uncertainties are compensated by the add-
the add-on module in a local manner.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .